Borg16: Unterschied zwischen den Versionen
K (→Compilieren) |
Keine Bearbeitungszusammenfassung |
||
| (135 dazwischenliegende Versionen von 5 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
{{ProjektInfoBox | {{ProjektInfoBox | ||
|name | |name=Borg16 | ||
|status | |status=stable | ||
|image | |image=Borg16Screen.jpg | ||
|description = Ein 256-LED Displaycontroller | |description=Ein 256-LED Displaycontroller | ||
| | |username=Suschman | ||
| | |author=Various, Tunix, | ||
|version | |version=2.0 | ||
|platform=AVR (ATmega32) | |||
|platform | |download=Software: [https://github.com/das-labor/borgware-2d Github] <br>Hardware: [https://www.das-labor.org/svn/hardware/borg16 SVN] [https://www.das-labor.org/trac/browser/hardware/borg16 browse] | ||
|tags=Licht & Sound, | |||
|download | |||
}} | }} | ||
=About= | |||
Der Borg16 basiert auf Andrés originalem 16×16-Borg und umfasst eine professionell hergestellte Platine zur Ansteuerung von 256 LEDs. Üblicherweise sind diese als eine Matrix von 16x16 LEDs angeordnet, aber auch andere Formate sind möglich. Sie verfügt über eine serielle Schnittelle und einen Anschluss für einen Joystick im 9-Pin Atari-Standard. Zusätzlich bietet die Platine Platz für einen [[CAN|CAN-Bus-Controller]] oder ein [[Datenfunk_mit_dem_AVR|RMF12-Funkmodul]] zur Vernetzung. | |||
Die [[Borgware-2D|Borgware-2D]] kann die LEDs mit vier Helligkeitsstufen ansteuern. Es existiert bereits eine breite Palette an Spielen, Demos und Testprogrammen. Der [[Blinken_Borgs#Simulatoren|Simulator]] ermöglicht zudem die Entwicklung neuer Software auch ohne die Hardware. Die Leerplatine samt Bauteile für den Borg16 gibt es im Labor als [[Bausätze|Bausatz]] zu kaufen. | |||
[[Benutzer:Tunix|Tunix]] hat auf den Labortagen 2012 einen Vortrag über den Borg16 gehalten. Es gibt davon eine Videoaufzeichnung, allerdings sind einige Punkte mittlerweile veraltet, daher ist es sinnvoller, die aktualisierten Folien weiter unten zu Rate zu ziehen. | |||
* [[Medium:Borg16_getting_started.pdf|Folien des Vortrages]] (fehlerbereinigt und aktualisiert auf den Stand von November 2014) | |||
* [[Medium:Borg16_firmware.zip|vorgefertigte Firmware-Images]] mit und ohne seriellen Bootloadern (bitte die [[#Vorgefertigte_Firmware-Images|Hinweise]] beachten) | |||
* Video: [https://www.youtube.com/watch?v=ANGcMmAVEIw Borg16 - Getting started] — Informationen mittlerweile veraltet, teilweise böse Fehler auf den Folien | |||
=Aufbau= | =Aufbau= | ||
== | == Borg16v1 == | ||
Die ursprüngliche Borg16-Platine von 2006 mit optionaler CAN-Unterstützung und ausschließlich bedrahteten Bauteilen. | |||
'''Mittlerweile vergriffen! Aber es sind noch genug [[#Borg16v2|Borg16v2-Platinen]] vorhanden'''. | |||
[[ | |||
[[Bild:Borg16Render.jpg|128px]] [[Bild:Borg16Schematic.png|128px]] [[Bild:Borg16Bestueckung.png|128px]] [[Bild:Borg16Board.jpg|128px]] | |||
[[Bild: | |||
[[Bild: | |||
=== | === Bestückungsliste=== | ||
{| class="wikitable" | |||
|- | |||
! Position !! Bauteil !! Wert/Typ !! Bemerkung | |||
|- | |||
|C1 || Elektrolyt-Kondensator || 330µF || | |||
|- | |||
|C2 || Keramik-Kondensator || 100nF || | |||
|- | |||
|C3 || Keramik-Kondensator || 100nF || | |||
|- | |||
|C4 || Keramik-Kondensator || 100nF || wird '''nicht''' bestückt | |||
|- | |||
|C5 || Keramik-Kondensator || 100nF || | |||
|- | |||
|C6 || Keramik-Kondensator || 18pF || | |||
|- | |||
|C7 || Keramik-Kondensator || 18pF || | |||
|- | |||
|CAN || Stift- oder Sockelleiste || 1×3 || | |||
|- | |||
|COL || Wannenbuchse 16pol. || 2×8 || | |||
|- | |||
|D1 || Kleinsignal-Diode || 1N4148 || Glasgehäuse, Anschlüsse vorsichtig biegen | |||
|- | |||
|D2 || Gleichrichter-Diode || 1N4004 || alternativ 1N4007 | |||
|- | |||
|IC1 || Treiber-IC || UDN2981A || alternativ TD62783AP | |||
|- | |||
|IC2 || Treiber-IC || UDN2981A || alternativ TD62783AP | |||
|- | |||
|IC3 || Schieberegister-IC || 74HCT164N || | |||
|- | |||
|IC4 || Schieberegister-IC || 74HCT164N || | |||
|- | |||
|IC5 || IC-Sockel || 40 polig: 2×20 || optional, aber sehr empfehlenswert | |||
|- | |||
|IC5 || Mikrocontroller || ATmega32(A) || alternativ ATmega324/644/1284(A/P/PA) | |||
|- | |||
|IC6 || CAN-Controller-IC || MCP2515P || alternativ MCP2510P | |||
|- | |||
|IC7 || CAN-Transceiver-IC || MCP2551P || | |||
|- | |||
|ISP || Stiftleiste || 2×5 || | |||
|- | |||
|JOY || Sub-D9 Male || || | |||
|- | |||
|LED3 || LED || 3mm, gelb, diffus || | |||
|- | |||
|PWR || Hohlsteckerbuchse || außen 6,3mm/innen 2,0mm || mit Lötfahnen | |||
|- | |||
|R01-R16 || Vorwiderstände || || siehe Text | |||
|- | |||
|R17 || Kohleschichtwiderstand || 10kΩ || | |||
|- | |||
|R18 || Kohleschichtwiderstand || 10kΩ || | |||
|- | |||
|R19 || Kohleschichtwiderstand || 10kΩ || | |||
|- | |||
|R20 || Kohleschichtwiderstand || 1kΩ || | |||
|- | |||
|R21 || Kohleschichtwiderstand || 1kΩ || | |||
|- | |||
|R22 || Kohleschichtwiderstand || 1kΩ || | |||
|- | |||
|R23 || Kohleschichtwiderstand || 1kΩ || | |||
|- | |||
|R24 || Kohleschichtwiderstand || 33kΩ || | |||
|- | |||
|RESET || Kurzhubtaster || || | |||
|- | |||
|ROW || Wannenbuchse 16pol. || 2×8 || | |||
|- | |||
|RS232 || Sub-D9 Female || || | |||
|- | |||
|T01-T16 || MOSFET || IRLD024 || | |||
|- | |||
|T17 || NPN-Transistor || BC547B || | |||
|- | |||
|T18 || NPN-Transistor || BC547B || | |||
|- | |||
|X1 || Schwingquarz || HC49/U 16 MHz || | |||
|} | |||
== Borg16v2 == | |||
Die aktuelle Borg16-Platine von 2009, die optional auch ein RFM12-Funkmodul aufnehmen kann. Aus Platzgründen bedürfen die (optionalen) CAN-Bauteile nun der SMD-Bauform. Die restlichen Komponenten sind wie gehabt bedrahtet. Noch in großer Stückzahl erhältlich.<br /> | |||
'''Diesen Bausatz (Leerplatine mit oder ohne Bauteilen) gibt es auch im Labor zu [[Bausätze|kaufen]].''' | |||
Wer die Bauteile selbst besorgen möchte, für den gibt es hier die entsprechenden [[Borg16 V2 Teile | Reichelt-Artikelnummern bzw. Warenkörbe]]. | |||
[[Bild:Borg16V2Schematic.png|128px]] [[Bild:Borg16 cover unten.jpg|128px]] [[Bild:Borg16 cover1.jpg|128px]] [[Bild:Borg16v2 Platine.jpg|84px]] [[Bild:Borg16v2-2014-2.jpg|128px]] [[Bild:Borg16-Bestückung.png|x96px]] | |||
Position | === Bestückungsliste=== | ||
C1 | {| class="wikitable" | ||
C2 | |- | ||
C3 | ! Position !! Bauteil !! Wert/Typ !! Bemerkung | ||
C4 | |- | ||
C5 | |C1 || Elektrolyt-Kondensator || 470µF || | ||
C6 | |- | ||
C7 | |C2 || Keramik-Kondensator || 100nF || | ||
D1 | |- | ||
D2 | |C3 || Keramik-Kondensator || 100nF || | ||
IC1 | |- | ||
IC2 | |C4 || Keramik-Kondensator || 100nF || wird '''nicht''' bestückt | ||
IC3 | |- | ||
IC4 | |C5 || Keramik-Kondensator || 100nF || | ||
IC5 | |- | ||
|C6 || Keramik-Kondensator || 22pF || | |||
R01- | |- | ||
R18 | |C7 || Keramik-Kondensator || 22pF || | ||
R19 | |- | ||
R20 | |D1 || Kleinsignal-Diode || 1N4148 || Glasgehäuse, Anschlüsse vorsichtig biegen | ||
R21 | |- | ||
R26 | |D2 || Gleichrichter-Diode || 1N4004 || alternativ 1N4007 | ||
T17 | |- | ||
T18 | |IC1 || Treiber-IC || UDN2981A || alternativ TD62783AP | ||
X1 | |- | ||
RESET | |IC2 || Treiber-IC || UDN2981A || alternativ TD62783AP | ||
|- | |||
|IC3 || Schieberegister-IC || 74HCT164N || | |||
COL | |- | ||
|IC4 || Schieberegister-IC || 74HCT164N || | |||
|- | |||
JOY | |IC5 || IC-Sockel || 40 polig: 2×20 || optional, aber sehr empfehlenswert | ||
|- | |||
|IC5 || Mikrocontroller || ATmega32(A) || alternativ ATmega324/644/1284(A/P/PA) | |||
|- | |||
|R01-R16 || Vorwiderstände || || siehe Text | |||
|- | |||
|R18 || Kohleschichtwiderstand || 10kΩ || | |||
|- | |||
|R19 || Kohleschichtwiderstand || 10kΩ || | |||
|- | |||
|R20 || Kohleschichtwiderstand || 1kΩ || | |||
|- | |||
|R21 || Kohleschichtwiderstand || 1kΩ || | |||
|- | |||
|R26 || Kohleschichtwiderstand || 1kΩ || | |||
|- | |||
|T01-T16 || MOSFET || IRLD024 || | |||
|- | |||
|T17 || NPN-Transistor || BC547B || | |||
|- | |||
|T18 || NPN-Transistor || BC547B || | |||
|- | |||
|X1 || Schwingquarz || HC49/U 16 MHz || | |||
|- | |||
|LED3 || LED || 3mm, gelb, diffus || | |||
|- | |||
|RESET || Kurzhubtaster || || | |||
|- | |||
|ROW || Wannenbuchse 16pol. || 2×8 || | |||
|- | |||
|COL || Wannenbuchse 16pol. || 2×8 || | |||
|- | |||
|RS232 || Sub-D9 Female || || | |||
|- | |||
|ISP || Stiftleiste || 2×5 || | |||
|- | |||
|JOY || Sub-D9 Male || || | |||
|- | |||
|PWR || Hohlsteckerbuchse || außen 6,3mm/innen 2,0mm || mit Lötfahnen | |||
|} | |||
===Optionale Borg16v2 CAN-Bestückungsliste:=== | |||
{| class="wikitable" | |||
IC6 | |- | ||
IC7 | ! Position !! Bauteil !! Wert !! Bemerkung | ||
|- | |||
LED1 | |CAN || Stift- oder Sockelleiste || 1×3 || | ||
LED2 | |- | ||
R22 | |IC6 || CAN-Controller-IC || MCP 2515-I/SO || SMD, Rückseite der Platine | ||
R23 | |- | ||
|IC7 || CAN-Transceiver-IC || MCP 2551-I/SN || SMD, Rückseite der Platine | |||
|- | |||
|LED1 || LED || 5mm, grün, diffus || | |||
|- | |||
|LED2 || LED || 5mm, rot, diffus || | |||
|- | |||
|R17 || Kohleschichtwiderstand || 10kΩ || | |||
|- | |||
|R22 || Kohleschichtwiderstand || 1kΩ || | |||
|- | |||
|R23 || Kohleschichtwiderstand || 1kΩ || | |||
|- | |||
|R24 || SMD-Widerstand || 33kΩ || SMD, Rückseite der Platine | |||
|} | |||
RFM12 | ===Optionale Borg16v2 RFM12-Bestückungsliste=== | ||
{| class="wikitable" | |||
|- | |||
ANT | ! Position !! Bauteil !! Wert !! Bemerkung | ||
|- | |||
|ANT || ca 17,5cm Kabel || || | |||
|- | |||
|IC8 || Funk-IC || RFM12 || | |||
|- | |||
|R25 || Kohleschichtwiderstand || 10kΩ || | |||
|} | |||
Die RFM12 und CAN Optionen schliessen sich leider gegenseitig aus, | Die RFM12 und CAN Optionen schliessen sich leider gegenseitig aus, es geht immer nur eines von beidem! | ||
es geht immer nur eines von beidem! | |||
==Bestückung== | |||
Die Bestückung der Platine läuft, wenn du schon einmal einen Bausatz zusammengelötet hast, nach dem bekannten Schema ab. Sollte dies dein erstes Bauprojekt sein, empfiehlt es sich [http://www.mikrocontroller.net/articles/L%C3%B6ten_%28praktisch%29 das Tutorial von Microcontroller.net] zu lesen. Um die gröbsten Anfängerfehler zu vermeiden, sind hier nochmal die grundlegendsten Vorgehensweisen beim Löten zusammengefasst. | |||
=== | ===Löthinweise für Anfänger=== | ||
Für Lötanfänger ist es sinnvoll, blei<u>haltiges</u> Lot zu verwenden, da es bei der Verarbeitung etwas tolerantere Temperatur- und Zeitfenster hat. Zudem lassen sich bei bleihaltigem Lot gelungene Lötverbindungen leicht an ihrem Glanz erkennen, während matte Lötverbindungen kalte Lötstellen anzeigen. Blei<u>freies</u> Lot erzeugt dagegen immer matte Lötstellen, was die optische Unterscheidung zwischen guten oder schlechten Lötverbindungen erschwert. | |||
Dünner Lötdraht mit 0,5mm Dicke lässt sich einfacher dosieren als Drähte mit 0,75mm oder gar mehr. Steht eine temperaturgereregelte Lötstation zur Verfügung, so ist diese auf etwa 340°C einzustellen. | |||
Bauteile | Die Bauteile werden von oben (also von der Seite mit dem Bestückungsdruck) durch die Platine gesteckt. Bei Bauteilen mit zwei Anschlüssen ist es für einen besseren Halt hilfreich, die Anschlussdrähte leicht nach außen zu biegen. Anschließend die Platine mit der nach unten zeigenden Oberseite auf den Tisch legen, so dass das Bauteil nicht herausfallen kann, und gegebenenfalls überstehende Drahtenden mit einem Seitenschneider auf etwa 1-2mm kürzen. | ||
Nun mit der sauberen Lötspitze sowohl Lötauge als auch Anschlussdraht (bzw. Pin) gleichmäßig für etwa ein bis zwei Sekunden erhitzen und dann den Lötdraht zuführen, und zwar dem Pin oder dem Lötauge, nicht direkt der Lötspitze, da sich die Flussmittelseele sonst zu schnell verflüchtigt. Sobald das Lötauge und der Pin vollständig vom Lot umflossen sind, Lötkolben und Draht von der Lötstelle nehmen und das Lot ein paar Sekunden aushärten lassen (keine Erschütterungen verursachen). | |||
Niemals versuchen, auf der Lötspitze verbliebenes Lot auf einen Pin oder ein Lötauge abzustreifen, da dort bereits alles an Flussmittel verdampft ist, was ursprünglich im Lötdraht enthalten war. Solches Lot oxidiert sofort, wodurch es breiartig, matt und schlecht leitend wird, ein Garant für kalte Lötstellen. So etwas gehört auf den Abstreifschwamm, nicht auf die Platine. Gleiches gilt, wenn sich beim Löten plötzlich größere Kugeln oder Klumpen an der Lötspitze bilden, die nicht auf die Lötstelle abfließen wollen. Ursachen für solche Kugeln sind oft ein zu lange andauernder Lötvorgang oder ein zu heiß eingestellter Lötkolben, in manchen Fällen auch minderwertiger Lötdraht mit zu wenig Flussmittel. | |||
ICs werden in der Regel mit leicht nach außen angewinkelten Pins ausgeliefert, so dass sie sich nicht ohne weiteres in die Platine einsetzen lassen. Die Pins keinesfalls einzeln von Hand zurecht biegen, da die Gefahr besteht, sie dabei umzuknicken, abzubrechen und das Bauteil unbrauchbar zu machen. Stattdessen die Pin-Reihen in ihrer Gesamtheit von jeder Seite vorsichtig an der Tischkante nach innen drücken. Dies gegebenenfalls so oft wiederholen, bis der IC in die Platine passt. Wem das zu unhandlich ist: Im Fachhandel gibt es im einstelligen Eurobereich auch spezielle Pin-Ausrichter zu kaufen. | |||
Um ICs, IC-Sockel oder Wannenstecker (beziehungsweise generell Bauteile mit vielen Pins) möglichst plan aufliegend auf der Platine zu befestigen, zunächst nur <u>einen einzigen Pin</u> in einer äußeren Ecke des Bauteils verlöten. Anschließend die Platine in die Hand nehmen und das Bauteil flächig gegen die Platine drücken und gedrückt halten. Von der anderen Seite mit dem Lötkolben die zuvor hergestellte Lötverbindung noch einmal verflüssigen. Typischerweise ergibt sich dann ein kurzes Einrastgeräusch und das Bauteil ist ausgerichtet. Es ist wichtig, dem Lot ein paar Sekunden zum Aushärten zu geben, bevor man den Druck vom Bauteil nimmt. Nun die restlichen Pins ganz normal verlöten, ausgehend vom schräg gegenüber liegenden Pin. | |||
===Empfohlene Reihenfolge=== | |||
Generell fängt man mit den flachsten Bauteilen an und arbeitet sich nach und nach zu den nächstgrößeren Bauteilen vor. Folgende Reihenfolge hat sich bewährt: | |||
* die Widerstände R01 bis R16, R18 bis R21 und R26 | |||
* sofern vorhanden, der Sockel für den Mikrocontroller (IC5) | |||
* Treiber-ICs (IC1 und IC2) und Schieberegister-ICs (IC3 und IC4) | |||
* falls kein Sockel zum Einsatz kommt, der Mikrocontoller (IC5) | |||
* '''Achtung:''' die ICs entsprechend der im Bestückungsdruck markierten Einkerbung orientieren, einen falsch eingelöteten IC wieder zu entfernen ist aufwändig und belastet sowohl die Bauteile als auch die Platine | |||
* die Zeilentreiber in Form der IRLD024-MOSFETs (T1 bis T16); deren großer Doppelpin zeigt dabei in Richtung der Wannenstecker | |||
* Gleichrichterdiode 1N4007 (D2) für den Verpolungsschutz, der Ring muss in Richtung des Strichs auf dem Bestückungsdruck zeigen | |||
* Schwingquarz mit 16 MHz (X1) | |||
* die Kondensatoren 22pF (C6, C7) und 100nF (C2, C3, C5); C4 wird '''nicht''' bestückt | |||
* gelbe 3mm LED (LED3), den abgeflachten Kragen entsprechend dem Bestückungsdruck orientieren | |||
* die Diode 1N4148 (D1) wird stehend festgelötet, dabei zeigt der schwarze Ring auf dem Bauteil in Richtung des Strichs auf dem Bestückungsdruck; Vorsicht beim Biegen der Beinchen, da das Glasgehäuse dieser Diode schnell bricht | |||
* die beiden BC547B-Transistoren (T17 und T18) | |||
* Reset-Taster (RESET) | |||
* die ISP-Steckerleiste (ISP) | |||
* die beiden Wannenstecker an ROW und COL; Pin 1 dieser Stecker ist mit einem aufgeprägten Dreieck markiert, bitte entsprechend dem Bestückungsdruck orientieren | |||
* Hohlsteckerbuchse (PWR) | |||
* die Sub-D Anschlüsse (JOY und RS232), der Stecker (männlich) an JOY, die Buchse (weiblich) an RS232 | |||
* der Elektrolyt-Kondensator mit 470µF (C1); bitte auf die Polung achten und den am Kondensatorgehäuse mit einem Minus markierten Pin '''nicht''' in den Pluspol der Platine stecken (im Bestückungsdruck mit einem '''+''' markiert) | |||
== LED Matrix == | |||
Pin 1 der Spalten und Zeilen | Die Zeilen bilden jeweils eine gemeinsame Kathode, die Spalten jeweils eine gemeinsame Anode. Bei einer korrekt aufgebauten Matrix (Draufsicht von vorne) liegen die "Pin 1"-Leitungen der Spalten und Zeilen in der '''rechten oberen''' Ecke (von hinten drauf geschaut also links oben). Die Borgware kann einen spiegelverkehrten Aufbau mittels der Option <code>Borg Hardware/Borg16 port setup/reverse cols</code> in Software ausgleichen. Dies kostet allerdings Rechenzeit, was sich u.a. in langsameren Plasma-Animationen zeigt. Besser gar nicht erst falsch verdrahten. | ||
Für den Bau des eigentlichen Displays | Sofern ihr die Matrix direkt aus den Beinchen der LEDs aufbauen wollt, empfiehlt es sich, die Zeilen zuerst zu verlöten, da die Kathoden kürzer sind. Die Spalten mit den längeren Anoden lassen sich dann leichter über die Zeilen hinweg verlegen, ohne einen Kurzschluss zu verursachen. | ||
Für den Bau des eigentlichen Displays eignen sich LEDs beliebiger Größe (zB. 3mm, 5mm, 10mm Durchmesser) und Farbe. Nur blaue und weiße LEDs haben eine zu hohe Dropout-Spannung, wer sie unbedingt verwenden will muss die Steuerung mit 6V betreiben. Wichtig ist es, nicht zu sparsam zu sein und LEDs mit 400mcd Helligkeit oder mehr zu verwenden, keine low-cost oder preiswerte Standardware. Diese verkraften die hohen Pulsströme nicht und leuchten sehr dunkel. | |||
(Hier Beispielliste möglicher Led-Widerstand Kombinationen eintragen - WIP)<br /> | (Hier Beispielliste möglicher Led-Widerstand Kombinationen eintragen - WIP)<br /> | ||
| Zeile 166: | Zeile 284: | ||
* Osram 10mm Kingbright Rot (Reichelt Bestellnummer "LED 10-4500 RT") - 12 Ohm | * Osram 10mm Kingbright Rot (Reichelt Bestellnummer "LED 10-4500 RT") - 12 Ohm | ||
==== LED Vorwiderstand | === LED Vorwiderstand berechnen === | ||
Über die Treibertransistoren gehen ca. 1,5 bis 2V (U<sub>Treiber</sub>) verloren. Die Spannung über den Vorwiderstand kann also mit <br /> | |||
U<sub>R</sub> = U<sub>Betrieb</sub> - U<sub>Treiber</sub> - U<sub>LED</sub> berechnet werden.<br /> | |||
Beispiel: Wir gehen von einer Betriebsspannung von 5V aus. Rote LEDs haben einen Spannungsabfall von 2V, an den Treiberbausteinen fallen ebenfalls 2V ab.<br/> | |||
U<sub>R</sub> = 5V - 2V - 2V = 1V<br/> | |||
Der Vorwiderstand berechnet sich nun nach dem Ohm'schen Gesetz R=U/I. Für einen LED-Pulsstrom von 100mA:<br/> | |||
R = 1V / 0,1A = 10Ω<br/> | |||
Da die LEDs mit 1/16 Einschaltdauer (6,25% Duty Cycle) bei ca. 120Hz angesteuert werden, kann man ihnen ruhig Überstrom geben. | |||
Das Datenblatt sagt genaueres dazu, wieviel erlaubt ist. Alle LEDs sollten mindestens 50mA vertragen können. | |||
Die Schaltung kann mit passendem Vorwiderstand Pulse von bis zu 120mA erzeugen. Dann muss das Netzteil aber auch knapp 2A (16×120mA) liefern können.<br/> | |||
Im Falle blauer oder weißer LEDs veträgt die Schaltung auch eine Betriebsspannung von 6V, damit die LEDs strotz der Spannungsabfälle über die Treiber noch ihre 3,5V bekommen. Noch höher sollte man die Versorgungsspannung aber nicht machen, weil sonst der Mikrokontrolller oder andere Teile leiden könnten. | |||
Zum Berechnen des Widerstandes gibt es auch einen praktischen [http://www.solderware.org/pages/led_resistor_calculator.de.html Vorwiderstandsrechner]. | |||
=== Gehäuseideen === | |||
* Ikea Bilderrahmen [http://www.ikea.com/de/de/catalog/products/20078050 RIBBA] in der Größe 50x50x4.5 cm | |||
* LEDs auf Lochrasterplatinen verlöten und milchtransparentes Plexiglas mit Distanzhülsen befestigen (der [https://www.das-labor.org/w/images/1/1c/Borg-andre2.jpg André-Borg] ist so gebaut) | |||
* Marcus hat eine [[Benutzer:Marcus/RainbowBorg|detaillierte Bauanleitung]] für seinen RainbowBorg geschrieben | |||
* Tunix hat eine [https://wiki.ctdo.de/projekte/borg16?&#aufbauanleitung detaillierte Bauanleitung] für den CTDO-Borg geschrieben | |||
Plexiglas gibt es beim [http://www.stegplattenshop.com stegplattenshop.com] (kostenloser Zuschnitt!) in Castrop-Rauxel oder bei Ebay, Handelsbezeichnung "PLexiglas XT Opal Weis" in unterschiedlichen Graden an Lichtdurchlässigkeit. Etwas teurer ist der [http://www.plexiglas-shop.com/DE/de/ Plexiglas-Shop von Evonik], der allerdings auch ausgefallenere Materialien wie das schwarze [http://www.plexiglas-shop.com/DE/de/fuer-hinterleuchtung-fgs06f3a5ma/plexiglas-led-truled-black-white-9h04-sc-33cfo9caunz~p.html 9H04-truLED-Plexiglas] führt. | |||
Günstige LEDs in verschiedenen Farben und Größen gibt es bei [http://www.easyseller24.de/index.php?cPath=119 www.easyseller24.de]. Es handelt sich dabei um B-Ware (siehe [[Benutzer:Marcus/RainbowBorg|Marcus' Bauanleitung]] für Details), allerdings ist die Qualität der LEDs für einen Borg gemeinhin ausreichend. | |||
Wer für seine Gehäusekonstruktion eine Trägerplatte für die LEDs benötigt und diese nicht selber fräsen möchte, kann sich im Baumarkt nach gelochten Faserplatten (MDF oder HDF) umschauen. Selbst wenn der Lochdurchmesser für die jeweiligen LEDs nicht ausreicht, lassen sich solche Platten relativ einfach nachbohren, da das Anzeichnen entfällt und sich der Bohrer wegen der bestehenden Löcher einfacher ansetzen lässt. Auch kann sich ein Blick bei Händlern von Akustikplatten lohnen, die u.a. die Fertigung von gelochten Platten nach Maß anbieten, was sie sich dann aber auch entsprechend bezahlen lassen. | |||
=Programmieren= | |||
Der Borg16 lässt sich ganz normal über die ISP-Schnittstelle mit STK200-Belegung programmieren, wie sie üblicherweise bei USBasp-Programmiergeräten zu finden ist. In der Draufsicht der Platine ist Pin 1 für den ISP '''rechts oben''', sofern die Anschlüsse PW, JOY und RS232 zu einem selbst zeigen. | |||
Bei erstmaliger Inbetriebnahme eines ATMega muss der SLOW-Jumper (J3) des USBasp gesetzt sein. Dies hängt damit zusammen, dass ein ATMega im Auslieferungszustand zunächst mit einem internen Taktgeber von 1 MHz arbeitet und der USBasp die Daten sonst zu schnell über die ISP-Schnittstelle übertragen würde. Bei USBasp-Varianten ohne SLOW-Jumper hilft die zusätzliche Angabe der Option '-B 4' in avrdude. Sobald der externe Taktgeber über die [[#Fuses|Fuses]] (siehe unten) konfiguriert ist, sind der SLOW-Jumper oder die besagte Option nicht mehr notwendig. | |||
== | ==Fuses== | ||
* | Ein fabrikneuer ATmega-Mikrocontroller bedarf vor der ersten Verwendung einer einmaligen Konfiguration, damit er mit der restlichen Hardware der Borg16-Platine harmoniert. Dies geschieht über sogenannte Fuses, als Bytes ausgelegte Werte, deren Bits bestimmte Eigenschaften des Controllers beeinflussen. Wir unterscheiden zwischen der ''lfuse'', der ''hfuse'' und bei den ATMega*4-Controllern zusätzlich der ''efuse'', die sich mit Hilfe eines Programmiergerätes ändern lassen. Die genaue Bedeutung der einzelnen Fuse-Werte lässt sich aus dem Datenblatt des jeweiligen Mikrocontrollers entnehmen. Konkret stellen wir bei den ATmegas folgendes ein: | ||
* | * Nutzung eines externen Schwingquarzes mit 16 MHz | ||
* EEPROM-Inhalte bleiben beim Flashen erhalten | |||
* Bootloader nutzen (optional) | |||
* Bootloadergröße von 512 Words (1024 Bytes) | |||
* serielle Programmierung über ISP-Schnittstelle zulassen | |||
* Brown-out Detection bei ca. 4,3 Volt, damit der Controller bei Unterspannung den Betrieb einstellt, bevor er Quatsch macht | |||
Die folgenden beiden Tabellen geben die richtigen Fuse-Werte für alle derzeit auf dem Borg16 unterstützten Mikrocontroller an. Welche Tabelle die richtige ist, hängt davon ab, ob zum Progammieren des Boards ausschließlich ein Programmiergerät oder die serielle Schnittstelle zum Einsatz kommen soll, wobei letztere einen [[#Serieller_Bootloader|seriellen Bootloader]] benötigt. | |||
= | '''Ohne Bootloader''' (Firmware wird ausschließlich über ein Programmiergerät übertragen) | ||
{| class="wikitable" | |||
|- | |||
! Controller !! lfuse !! hfuse !! efuse !! avrdude-Befehl für USBasp (Copy-Paste) | |||
|- | |||
| ATmega32 || 0x2f || 0xc5 || - || <code>avrdude -c usbasp -p m32 -U lfuse:w:0x2f:m -U hfuse:w:0xc5:m</code> | |||
|- | |||
| ATmega644 || 0xe7 || 0xd7 || 0xfc || <code>avrdude -c usbasp -p m644 -U lfuse:w:0xe7:m -U hfuse:w:0xd7:m -U efuse:w:0xfc:m</code> | |||
|- | |||
| ATmega644P || 0xe7 || 0xd7 || 0xfc || <code>avrdude -c usbasp -p m644p -U lfuse:w:0xe7:m -U hfuse:w:0xd7:m -U efuse:w:0xfc:m</code> | |||
|- | |||
| ATmega1284 || 0xe7 || 0xd7 || 0xfc || <code>avrdude -c usbasp -p m1284 -U lfuse:w:0xe7:m -U hfuse:w:0xd7:m -U efuse:w:0xfc:m</code> | |||
|- | |||
| ATmega1284P || 0xe7 || 0xd7 || 0xfc || <code>avrdude -c usbasp -p m1284p -U lfuse:w:0xe7:m -U hfuse:w:0xd7:m -U efuse:w:0xfc:m</code> | |||
|} | |||
'''Mit Bootloader''' (Firmware wird auch über die serielle Schnittstelle übertragen) | |||
{| class="wikitable" | |||
|- | |||
! Controller !! lfuse !! hfuse !! efuse !! avrdude-Befehl für USBasp (Copy-Paste) | |||
|- | |||
| ATmega32 || 0x2f || 0xc4 || - || <code>avrdude -c usbasp -p m32 -U lfuse:w:0x2f:m -U hfuse:w:0xc4:m</code> | |||
|- | |||
| ATmega644 || 0xe7 || 0xd6 || 0xfc || <code>avrdude -c usbasp -p m644 -U lfuse:w:0xe7:m -U hfuse:w:0xd6:m -U efuse:w:0xfc:m</code> | |||
|- | |||
| ATmega644P || 0xe7 || 0xd6 || 0xfc || <code>avrdude -c usbasp -p m644p -U lfuse:w:0xe7:m -U hfuse:w:0xd6:m -U efuse:w:0xfc:m</code> | |||
|- | |||
| ATmega1284 || 0xe7 || 0xd6 || 0xfc || <code>avrdude -c usbasp -p m1284 -U lfuse:w:0xe7:m -U hfuse:w:0xd6:m -U efuse:w:0xfc:m</code> | |||
|- | |||
| ATmega1284P || 0xe7 || 0xd6 || 0xfc || <code>avrdude -c usbasp -p m1284p -U lfuse:w:0xe7:m -U hfuse:w:0xd6:m -U efuse:w:0xfc:m</code> | |||
|} | |||
Wer tiefer in die Materie einsteigen möchte: Der [http://www.engbedded.com/fusecalc Fuse-Calculator von Engbedded] kann die hexadezimalen Werte der Fuses in sprechende Namen übersetzen. Die dort verwendeten Bezeichnungen lassen sich dann bequem im Datenblatt des jeweiligen Controllers nachschlagen. | |||
==Vorgefertigte Firmware-Images== | |||
Wer sich nicht zutraut, die [[Borgware-2D]] selber zu kompilieren oder die neu gebaute Hardware einfach nur schnell mit einer fertigen Firmware testen möchte, kann sich das passende Image aus diesem [[Medium:Borg16_firmware.zip|ZIP-Archiv]] (Stand 12.10.2014) heraussuchen. Dort finden sich Images für den ATmega32, ATmega644(P) und den ATmega1284(P). Wir weisen an dieser Stelle darauf hin, dass diese Images '''nur mit Standardversionen''' des Borg16 funktionieren, die Matrix also wie oben beschrieben korrekt verdrahtet ist (Koordinate [0,0] rechts oben) und ein Quarz mit 16 MHz verwendet wird. Diese Images enthalten keinen CAN- oder RFM12-Support. Bevor es jemand versucht: Die Images sind nicht für den [[Blinken_Borgs#Borg16|André-Borg]] und auch nicht für die Borg-Jacke geeignet. | |||
= | Das Archiv enthält neben den normalen Borgware-2D-Images auch solche mit integriertem seriellen Bootloader, die wir manuell erstellt haben. Wird die Firmware ausschließlich mit einem Programmiergerät wie dem USBasp übertragen, genügen die normalen Images. Soll die Firmware hingegen zukünftig über die serielle Schnittstelle aktualisiert werden, muss mit einem Programmiergerät initial ein Image mit seriellem Bootloader auf den Chip programmiert werden. In den [[#Fuses|Fuses]] ist dieser gegebenenfalls einzuschalten. Danach ist das Programmiergerät nicht mehr nötig und es lassen sich normale Images '''ohne''' integrierten Bootloader (dieser kann sich ja nicht selbst überschreiben) über die serielle Schnittstelle übertragen. Dazu wartet der Controller nach einem Reset für zwei Sekunden auf eine serielle Verbindung (19200 Baud). | ||
Siehe auch den Abschnitt über [[#Serieller_Bootloader|serielle Bootloader]] weiter unten. | |||
==Flashen der Firmware mit dem USBasp-Programmiergerät== | |||
Dieser Abschnitt geht davon aus, dass bereits ein Firmware-Image mit dem Namen <code>image.hex</code> im aktuellen Verzeichnis vorliegt. Ein solches Image lässt sich mit Hilfe eines eines USBasp-Programmiergerätes folgendermaßen flashen: | |||
{| class="wikitable" | |||
|- | |||
! Controller !! avrdude-Befehl | |||
|- | |||
| ATmega32 || <code>avrdude -c usbasp -p m32 -U f:w:image.hex</code> | |||
|- | |||
| ATmega644 || <code>avrdude -c usbasp -p m644 -U f:w:image.hex</code> | |||
|- | |||
| ATmega644P || <code>avrdude -c usbasp -p m644p -U f:w:image.hex</code> | |||
|- | |||
| ATmega1284 || <code>avrdude -c usbasp -p m1284 -U f:w:image.hex</code> | |||
|- | |||
| ATmega1284P || <code>avrdude -c usbasp -p m1284p -U f:w:image.hex</code> | |||
|} | |||
Dies weißt avrdude an, als Programmiergerät "<code>-c</code>" einen USBasp zu verwenden, als Target "<code>-p</code>" einen ATmega32/644/644P/1284/1284P anzunehmen und eine Speicheroperation "<code>-U</code>" im Flash-ROM "<code>f</code>" durchzuführen, und zwar das Schreiben "<code>w</code>" des Inhalts von "<code>image.hex</code>". | |||
Wird die Firmware direkt mit dem USBasp auf den ATmega übertragen, geht ein eventuell zuvor aufgespielter Bootloader verloren. Das liegt daran, dass das Flash-ROM beim Programmieren über die ISP-Schnittstelle komplett gelöscht wird und in einer frisch kompilierten Borgware 2D kein Bootloader enthalten ist. Dementsprechend ist der Bootloader-Support in den Fuses gegebenenfalls zu deaktivieren. Eine Ausnahme sind die weiter oben beschriebenen, von uns bereitgestellten [[#Vorgefertigte_Firmware-Images|Images]]. Dort gibt es Varianten, die wir manuell mit einem zusätzlichen Bootloader versehen haben, so das die Firmware auch nach Nutzung eines Programmiergerätes noch über die serielle Schnittstelle aktualisiert werden kann. | |||
==Serieller Bootloader== | |||
Der hintere Teil des Flash-ROMs kann per Fuse für einen Bootloader reserviert werden, der nach einem Reset direkt gestartet wird. Er kann dann bei Bedarf die eigentliche Firmware von anderen Quellen wie der seriellen Schnittstelle nachladen und im vorderen Teil des Flash-ROMs abspeichern, ansonsten springt er direkt in die eigentliche Firmware. | |||
In der [http://www.atmel.com/Images/doc1644.pdf AVR109 Application Note] beschreibt Atmel ein Protokoll zum Programmieren von AVR-Controllern über die serielle Schnittstelle. Dieses Protokoll wird von vielen AVR-zentrischen Werkzeugen (u.a. von avrdude) unterstützt. Unter Zuhilfenahme eines entsprechenden Bootloaders verhält sich der Borg16 dann selbst wie ein serielles Programmiergerät. Mit einem normalen Verlängerungskabel (1-zu-1) oder USB-RS232-Wandler lässt sich das Board dann neu programmieren. | |||
In früher angebotenen Bausätzen haben wir den [http://www.lochraster.org/foodloader/ Foodloader] auf dem Mikrocontroller vorinstalliert. Leider ist besagter serieller Bootloader nicht mehr mit neueren Versionen des GNU-C-Compilers kompatibel (Compiler-Fehler bzw. Build sprengt die Größe von 512 Words). Als Alternative empfehlen wir den [http://siwawi.bauing.uni-kl.de/avr_projects/index.html#avrprog_boot AVRProg Boot 0.85] von Martin Thomas et al. Die Quellen gibt es [http://www.siwawi.arubi.uni-kl.de/avr_projects/avrprog_boot_v0_85_20081203.zip hier]. Zu dessen Konfiguration sei auf die mitgelieferte Dokumentation und auf den Borg16-Vortrag verwiesen. Durch Verwendung dieses Bootloaders steht der Firmware 1 Kilobyte weniger auf dem Flash-ROM zur Verfügung. | |||
Ein leerer Controller (bzw. ein Controller ohne Bootloader) muss zunächst mittels eines Programmiergeräts über die ISP-Schnittstelle mit einem Bootloader-Image programmiert werden. Ebenfalls sind die [[#Fuses|Fuses]] entsprechend anzupassen. | |||
Das Überspielen der Firmware über die serielle Schnittstelle mit 19200 Baud am Beispiel von avrdude: | |||
{| class="wikitable" | |||
|- | |||
! Controller !! avrdude-Befehl | |||
|- | |||
| ATmega32 || <code>avrdude -c avr109 -b 19200 -P serialdev -p m32 -U f:w:image.hex</code> | |||
|- | |||
| ATmega644 || <code>avrdude -c avr109 -b 19200 -P serialdev -p m644 -U f:w:image.hex</code> | |||
|- | |||
| ATmega644P || <code>avrdude -c avr109 -b 19200 -P serialdev -p m644p -U f:w:image.hex</code> | |||
|- | |||
| ATmega1284 || <code>avrdude -c avr109 -b 19200 -P serialdev -p m1284 -U f:w:image.hex</code> | |||
|- | |||
| ATmega1284P || <code>avrdude -c avr109 -b 19200 -P serialdev -p m1284p -U f:w:image.hex</code> | |||
|} | |||
<code>serialdev</code> ist auf den Namen der verwendeten seriellen Schnittstelle zu setzen (z.B. <code>/dev/ttyS0</code>, <code>/dev/ttyUSB0</code> oder <code>COM1</code>). Damit diese Befehle funktionieren, muss der Mikrocontroller den Bootloader ausführen. In den von uns [[#Vorgefertigte_Firmware-Images|bereitgestellten Images]] tut er das nach einem Reset für 2 Sekunden. Dies ist natürlich eine etwas knappe Zeitspanne, um einen avrdude-Befehl abzusetzen. Bequemer ist, mit der [[#Shell_auf_der_seriellen_Schnittstelle|UART-Shell]] einen Reset-Befehl zu senden (siehe dort). Im Gegensatz zur Verwendung eines Programmiergerätes wird das Flash-ROM beim seriellen Update nicht komplett gelöscht und der Bootloader bleibt erhalten (warum sollte er sich auch selber löschen). Daher werden bei dieser Übertragungsart auch keine speziellen Images mit einem eigenen Bootloader benötigt. | |||
Noch ein Hinweis: Fuses lassen sich nicht über den seriellen Bootloader einstellen, dafür ist nach wie vor ein Programmiergerät nötig. | |||
=Shell auf der seriellen Schnittstelle= | |||
Der Borg16 stellt über die serielle Schnittstelle eine kleine Shell bereit, sofern im Menuconfig die Option <code>Borg-Hardware/Borg16-port-setup/UART-Support</code> angewählt ist (in den [[Borgware-2D]]-Versionen ab September 2014). Die Schnittstellenparameter sind standardmäßig folgendermaßen eingestellt: | |||
* 19200 Baud | |||
* 8 Datenbits | |||
* keine Parität | |||
* 1 Stoppbit | |||
* keine Flusskontrolle | |||
Sofern sich (unter Linux) der USB-Konverter unter ''/dev/ttyUSB0'' befindet, kann der Nutzer die Shell folgendermaßen erreichen: | |||
<code>screen /dev/ttyUSB0 19200</code> | |||
Windows-Benutzer können [http://www.chiark.greenend.org.uk/~sgtatham/putty/download.html PuTTY] verwenden. Dort unter der Kategorie '''''Session''''' den ''Connection Type'' <code>Serial</code> anwählen. Anschließend in der Kategorie '''''Serial''''' die oben angegebenen Parameter eintragen. | |||
In beiden Fällen öffnet sich eine Minimal-Shell, die so minimal ist, dass sie keine Cursor-Tasten und auch keine History unterstützt. Backspace ist möglich, Ctrl-L überträgt die aktuelle Eingabe erneut und Ctrl-U löscht die derzeitige Eingabe. Dies ist nützlich, falls die UART beim Einstöpseln des Kabels irgendwelche Zeichen erkennt und man sicher gehen möchte, dass nur die Zeichen den Borg erreichen, die man explizit eingetippt hat. | |||
Folgende Befehle nimmt die Borgware-2D über die serielle Schnittstelle entgegen: | |||
{| class="wikitable" | |||
|- | |||
! Befehl !! Bedeutung | |||
|- | |||
| <code>erase</code> || Löscht das EEPROM und damit den Reset-Counter sowie alle Tetris-Hi-Scores. | |||
|- | |||
| <code>help</code> || Gibt die akzeptierten Befehle aus. | |||
|- | |||
| <code>mode</code> ''n'' || Wechselt in den Modus (gleich Animation) mit der Nummer ''n'' (von 0-255). Wird ''n'' weggelassen, zeigt die Konsole die aktuelle Modusnummer an. | |||
|- | |||
| <code>msg</code> ''text'' || Gibt ''text'' als einen von rechts nach links scrollenden Text aus. | |||
|- | |||
| <code>next</code> || Springt zur nächsten Animation. | |||
|- | |||
| <code>prev</code> || Springt zur vorherigen Animation. | |||
|- | |||
| <code>reset</code> || Startet den Borg neu; nützlich, um eine neue Firmware zu flashen. | |||
|- | |||
| <code>scroll</code> ''text'' || Wie ''msg'', nur das die Texte in der [https://www.das-labor.org/wiki/BorgTextAnim BorgTextAnim]-Sprache geschrieben sein müssen. | |||
|- | |||
| <code>test</code> ''n'' || Gibt das Testmuster mit der Nummer ''n'' aus. 0≤''n''≤3 schaltet alle Pixel in der Helligkeitsstufe ''n'' ein. ''n''=4 zeichnet ein horizontales Streifenmuster, ''n''=5 ein vertikales. | |||
|} | |||
Ist der Borg16 mit einem seriellen Bootloader ausgestattet, läßt sich mit der UART-Shell bequem von der Eingabeaufforderung aus ein Reset auslösen und unmittelbar danach der serielle Flashvorgang starten (hier am Beispiel von Linux mit der seriellen Schnittstelle an <code>/dev/ttyUSB0</code>): | |||
<code>stty -F /dev/ttyUSB0 19200</code> | |||
<code>echo -e "\x15reset" >/dev/USB0 && avrdude -c avr109 -P /dev/ttyUSB0 -b 19200 -p atmega32 -U f:w:image.hex</code> | |||
Das "<code>\x15</code>" im <code>echo</code>-Befehl (Option <code>-e</code> nicht vergessen) ist gleichbedeutend mit einem Ctrl-U, so das der Zeichenpuffer garantiert leer ist, bevor der "reset"-Befehl übertragen wird. | |||
==== | ==Modusnummern== | ||
Hier sind die Modusnummern und ihre Bedeutung für den <code>mode</code>-Befehl aufgelistet: | |||
= | {| class="wikitable" | ||
! Nr. !! Modus | |||
|- | |||
| 1|| Lauftext | |||
|- | |||
| 2|| Spriale | |||
|- | |||
| 3|| diagonale Linien | |||
|- | |||
| 4|| Snake-Demo | |||
|- | |||
| 5|| Schachbrett | |||
|- | |||
| 6|| Kaminfeuer | |||
|- | |||
| 7|| CAN-Zeitanzeige (nur im Bochumer Labor mit CAN-Bus sinnvoll) | |||
|- | |||
| 8|| Matrix | |||
|- | |||
| 9|| Zufallsrauschen | |||
|- | |||
| 10|| Fallende Spielfiguren | |||
|- | |||
| 11|| Game Of Life | |||
|- | |||
| 12|| Fliegende Punkte | |||
|- | |||
| 13|| Breakout-Demo | |||
|- | |||
| 14|| Animationen von Martin Herweg | |||
|- | |||
| 15|| rotierendes Moiré-Muster | |||
|- | |||
| 16|| CAN-Zeitanzeige, 2. Slot (nur im Bochumer Labor mit CAN-Bus sinnvoll) | |||
|- | |||
| 17|| Langton's Ameise | |||
|- | |||
| 18|| Labor-Logo | |||
|- | |||
| 19|| hypnotisierende Kröte | |||
|- | |||
| 20|| Labortage MMXI "Operating Out Of Spec"-Logo | |||
|- | |||
| 21|| Fairydust-Rakete | |||
|- | |||
| 22|| Plasma | |||
|- | |||
| 23|| pulsierende Ringe | |||
|- | |||
| 24|| schwarzes Loch | |||
|- | |||
| 25|| schimmernde Rechtecke | |||
|- | |||
| 26|| DNA | |||
|- | |||
| 31|| Test: Helligkeitsstufe 1 | |||
|- | |||
| 32|| Test: Helligkeitsstufe 2 | |||
|- | |||
| 33|| Test: Helligkeitsstufe 3 | |||
|- | |||
| 35|| Test: Farbpalette | |||
|- | |||
| 36|| wandernde Zeile | |||
|- | |||
| 37|| wandernde Spalte | |||
|- | |||
| 38|| wandernde Spalte (bidirektional) | |||
|- | |||
| 39|| wandernde Zeile (birektional) | |||
|- | |||
| 253|| Sprung zu Modus 1 | |||
|- | |||
| 254|| Spielmenü (ACHTUNG: Solange das Menü läuft ist kein Moduswechsel möglich.) | |||
|- | |||
| 255|| Abschalten der Anzeige (ACHTUNG: Dieser Modus kann nur über die Kommandos <code>mode</code>, <code>next</code> und <code>prev</code> verlassen werden.) | |||
|} | |||
Üblicherweise ist nicht jeder Modus in der Firmware konfiguriert. Wird beim <code>mode</code>-Befehl eine nicht vergebene bzw. nicht konfigurierte Modusnummer angegeben, springt die Borgware einfach zum nächsten verfügbaren Modus. | |||
Während der Anzeige des Menüs bzw. während eines Spiels ist kein Moduswechsel möglich. | |||
==== | =Troubleshooting= | ||
==<code>avrdude</code> meldet zusammen mit dem USBasp immer "target doesn't answer"== | |||
* Bei fabrikneuen ATmegas sicherstellen, dass beim erstmaligen Setzen der [[#Fuses|Fuses]] entweder der Slow-Jumper des USBasps eingeschaltet ist oder die avrdude-Befehlszeile zusätzlich die Option "-B 4" enthält. | |||
* Sicherstellen, dass die Pfostenbuchse des Programmierkabels richtig herum in den ISP-Steckplatz der Platine gesteckt ist. | |||
* Wird die Borg16-Platine ausreichend mit Spannung versorgt? ''Entweder'' ein passendes Netzteil an der Borg16-Platine anschließen ''oder'' Stromversorgung des USBasps per Jumper zuschalten (aber nicht beides gleichzeitig). Bei einem Netzteil sicher stellen, dass auch wirklich 5 Volt herauskommen. | |||
* Sitzt der Mikrocontroller ordentlich in seinem Sockel? Der ATmega muss plan auf dem Sockel aufliegen, darf nicht wackeln und sich auch nicht an einer Seite abheben. Alle Pins müssen gerade im Sockel stecken (keine Knicke). | |||
* Mikrocontroller falsch herum eingesetzt? Das kann im Eifer des Gefechts schneller passieren, als einem lieb ist. Falls die Kerbe des Chips nicht entsprechend dem Bestückungsdruck orientiert ist, Platine umgehend vom Strom trennen und den ATmega richtig herum einsetzen. | |||
* Tritt der Fehler erst seit dem letzten Setzen der [[#Fuses|Fuses]] auf, wurde möglicherweise ein falscher Taktgebertyp eingestellt. Am einfachsten ist es, den Mikrocontroller in eine Entwicklungsplatine einzusetzen, die einen passenden Taktgeber bereit hält und dort die [[#Fuses|Fuses]] zu korrigieren. Falls der erwartete Typ des Taktgebers "External Clocksource" ist, lässt sich auch mit Hilfe eines zweiten Mikrocontrollers (z.B. Arduino) ein Taktsignal an einem Port-Pin erzeugen, der wiederum mit dem XTAL1-Pin des Borg16-ATmegas verbunden werden muss. Ist der Borg16-ATmega daraufhin ansprechbar, auch hier sofort die [[#Fuses|Fuses]] korrigieren. | |||
* Mikrocontroller defekt? Falls der Controller auch in anderen Platinen versagt, ist Ersatz gefragt. | |||
* Mikrocontroller funktioniert woanders aber nicht in der Borg16-Platine? Sofern nicht der Taktgeber die Ursache ist, nach kalten Lötstellen suchen. | |||
==== | ==Programmierung mit dem USBasp ist sehr langsam== | ||
* Slow-Jumper gesetzt? Dieser ist nach dem Einstellen der (korrekten!) Fuses nicht mehr notwendig. | |||
* Taucht eine Option "-B 4" (oder auch eine andere Zahl als 4) im <code>avrdude</code>-Kommando auf? Auch diese Option ist nach dem setzen der Fuses unnötig. | |||
==== | ==Programmierung über die serielle Schnittstelle schlägt fehl== | ||
* Ist der Bootloader in den [[#Fuses|Fuses]] eingeschaltet? Stimmt die in den Fuses eingestellte Größe des Bootloaders (512 ''Words'' im Fall von <code>avrprogboot</code>)? | |||
* Ist auf dem Mikrocontroller überhaupt ein serieller Bootloader aufgespielt? Bei unseren [[#Vorgefertigte Firmware-Images|vorgefertigten Firmware-Images]] gibt es auch Varianten, die einen seriellen Bootloader enthalten. | |||
* Ist die Baudrate korrekt? Die in unseren Firmware-Images enthaltenen Bootloader sind auf 19200 Baud eingestellt (Voraussetzung ist ein Quarz mit 16 MHz). | |||
* Ist eine andere Baudrate als 19200 im Bootloader eingestellt oder wird ein Quarz mit einer anderen Frequenz als 16 MHz verwendet? Dann sicherstellen, dass die Baudrate auch zur Taktfrequenz des Mikrocontrollers passt. ATmegas können Baudraten nur über ganzzahlige Teiler ihrer Taktfrequenz annähern. Weicht diese Näherung um mehr als 0,2% von der tatsächlich geforderten Baudrate ab, wird die serielle Übertragung unzuverlässig. Welche Baudraten zu welchen Taktfrequenzen passen, lässt sich [http://www.kreatives-chaos.com/artikel/baudraten-tabelle-fuer-avrs hier] entnehmen. | |||
* Wird ein USB-zu-seriell-Konverter benutzt? Die Spannungen an der seriellen Schnittstelle des Borg16 bewegen sich am Rand der Norm, womit nicht jeder USB-Konverter zurecht kommt. Hier hilft es nur, ein anderes Modell zu nehmen. USB-Konverter mit dem Chip PL2303 von Prolific (unter anderem in einem USB-Konverter von ''Goobay'' verbaut, bei [http://www.reichelt.de/USB-Konverter/USB2-SERIELL/3/index.html?ACTION=3&GROUPID=6105&ARTICLE=58641&OFFSET=16& Reichelt] erhältlich) funktionieren mit dem Borg16. Auch echte serielle Schnittstellen (vornehmlich an älteren PCs zu finden) funktionieren tadellos. | |||
==== | ==Firmware startet unerwartet neu, bleibt stehen oder stürzt mit wildem Geflacker ab== | ||
* Handelt es sich um selbst kompilierte/modifizierte Firmware? Wenn ja, einmal mit unserer [[#Vorgefertigte Firmware-Images|vorgefertigten Firmware]] prüfen, ob wirklich ein Hardware-Problem vorliegt. | |||
* Ist das Netzteil richtig dimensioniert? Je nach verbauten LEDs muss das Netzteil Ströme von bis zu 2A (bei 120mA pro LED) liefern können, ohne das die Versorgungsspannung absinkt. Fällt die Spannung unter 4,3V (bzw. 4,0V bei ATmega32), hält die Brownout-Detection den Prozessor an und startet ihn neu, sobald die Spannung wieder hoch genug ist. Da dabei alle LEDs abgeschaltet werden, ist die Unterspannungssituation meist umgehend vorbei, was den Eindruck eines spontanen Neustarts erweckt. | |||
* Ist die Firmware mit CAN- und/oder RFM12-Support kompiliert worden, obwohl keine dieser Optionen auf der jeweiligen Borg16-Platine verbaut ist? Dies führt meist direkt beim Start zu komischen Abstürzen mit wirrem Geflacker. In dem Fall entweder die Firmware ohne CAN- bzw. RFM12-Support kompilieren oder die [[#Vorgefertigte Firmware-Images|vorgefertigte Borg16-Firmware]] nehmen. | |||
* Etwas im Menuconfig-Tool geändert und vor dem ersten Kompilieren <code>make clean</code> vergessen? Das Buildsystem erkennt nicht immer, welche Dateien neu kompiliert werden müssen, wenn Einstellungen im Menuconfig-Tool geändert werden. Ein <code>make clean</code> stellt sicher, dass alles noch mal neu kompiliert wird. | |||
* Brownout-Detection in den Fuses nicht gesetzt? Dann kann es zu Memory-Corruption im EEPROM oder Flash kommen. Ursache dafür ist der beim Einschalten langsame Anstieg der Betriebsspannung auf den Nennwert beziehungsweise der langsame Spannungseinbruch beim Abschalten. Ohne die Brownout-Detection startet der ATmega bereits vor Erreichen der Nennspannung und arbeitet fehlerhaft. Das kann dazu führen, dass er wahllos irgendwelche Werte im EEPROM oder im Flash verändert, insbesondere bei Bootloadern, die über die entsprechende Speicherinstruktionen verfügen. Ob wirklich so ein Problem vorliegt, lasst sich am einfachsten mit einem Verify gegen das verwendete Image prüfen. Steht dies nicht zur Verfügung, hilft oft ein Blick ins EEPROM. Treten nach etwa 200 Bytes (mehr benutzt die Borgware-2D nicht) vereinzelt andere Werte als 0xFF auf, ist dies ein deutlicher Hinweis auf Memory-Corruption. Abhilfe: Die [[#Fuses|korrekten Fuses]] mit Brownout-Detection setzen und den Mikrocontroller neu programmieren. | |||
* [[Datei:Borg16v2_Abblockkondensator.jpg|x100px|thumb|right]] Möglicherweise ist ein zusätzlicher Abblockkondensator am ATmega-Controller notwendig. Auf den meisten Platinen funktionieren die ATmega-Controller einwandfrei. Allerdings kommt es bei manchen Kombinationen von Controllern, Platinen, Netzteilen und LED-Matrizen vor, dass die Versorgungsspannung des Controllers so stark schwankt, dass kein dauerhafter stabiler Betrieb gewährleistet ist. Typischerweise stürzt die Firmware dann während der Spiral- oder Lagerfeueranimation ab. ATmega644P-Controller sind anfälliger für dieses Problem als andere ATmega-Typen. In so einem Fall hilft es, auf der Rückseite der Platine einen zusätzlichen Keramikkondensator mit 100nF zwischen [[media:Borg16v2_Abblockkondensator.jpg|Pin 10 und 11]] des ATmega-Controllers zu löten (siehe Abbildung). Die Beinchen des Keramikkondensators sollten dabei so kurz wie möglich sein, damit er seine volle Wirkung entfalten kann. | |||
=== | =Joysticks= | ||
[[Datei:Gamepad_Borg16.JPG|thumb|right|Fix zusammengebasteltes Selbstbau-Gamepad]] | |||
Verwendung finden Joysticks nach dem 9-Pin Atari Standard der 80er, z.B vom C64, Amiga, Atari ST, Atari VCS 2600. Gut und extrem robust sind die "Competition Pro" Joysticks. Gibt es noch recht häufig auf dem Flohmarkt. Wurden aber auch noch mal neu produziert als [http://www.google.de/search?q=Competition+Pro+Retro Competition Pro Retro], zu bekommen unter anderem bei [https://icomp.de/shop-icomp/de/produckt-details/product/competition-pro-retro.html Individual Computers]. Eine Alternative ist bspw. ein [http://www.vesalia.de/d_boomerangb101p.htm Gamepad]. | |||
Die Spielecontroller sind digital und ziehen den jeweiligen Pin auf GND (siehe [http://www.epanorama.net/documents/joystick/ataristick.html hier] für Belegung), insofern geht das auch sehr schnell auf einer kleinen Lochrasterplatine. | |||
Ferner ist die Nutzung einer [[Funkfernbedienung]] als Joystick möglich (in Arbeit). | |||
= | =Software= | ||
Den Quellcode für die Software gibt es bei [https://github.com/das-labor/borgware-2d Github]. Für genauere Informationen siehe den [[Borgware-2D]]-Artikel. | |||
==== | ==Module== | ||
=== | ===Spiele=== | ||
* Tetris — das altbekannte Tetris, mit Highscore-Liste | |||
* Bastet Tetris — gibt dir immer den gerade unpassendsten Stein (angelehnt an [http://fph.altervista.org/prog/bastet.html Bastet]) | |||
* First Person Tetris — nicht der Stein dreht sich, sondern das Spielfeld | |||
* Snake — Du spielst das bekannte Spiel "Snake" auf dem Borg. | |||
* LaborInvaders — ein Spaceinvaders Clone | |||
* Breakout — ein [http://de.wikipedia.org/wiki/Breakout_(Computerspiel) Breakout]-Clone, ähnlich Arkanoid | |||
=== | ===Animationen=== | ||
* AutoSnake — hier spielt die Snake mit sich selber | |||
* AutoBreakout — Breakout als Animation | |||
* GameOfLife — [http://de.wikipedia.org/wiki/Conways_Spiel_des_Lebens Conways Spiel des Lebens] | |||
* Langtons Ameise - eine Simulation von [http://de.wikipedia.org/wiki/Ameise_(Turingmaschine) Langtons Ameise] | |||
* Laborlogo — ein scrollendes Laborlogo | |||
* Hypnotoad — ALL GLORY TO THE [http://r33b.net HYPNOTOAD!] | |||
* Matrix — Follow the white rabbit… | |||
* Kaminfeuer — es wärmt in kalten Nächten | |||
* Zufallsgenerator — nach etwas Getüftel tut es der Zufallsgenerator recht gut, dies kann man hier betrachten | |||
* Laufschrift — ein frei programmierbarer Scrolltext, nutzt [[BorgTextAnim]] | |||
* Counter — der Counter zählt die Neustarts der Platine hoch | |||
* Testprogramme | |||
** Wechselndes Schachbrettmuster | |||
** Wandernde Linien mit Helligkeitswechsel | |||
** Spirale | |||
==== | ==MCUF-Schnittstelle== | ||
=MCUF- | '''ACHTUNG: Das MCUF-Modul bezieht sich auf eine [http://www.das-labor.org/trac/browser/microcontroller/src-atmel/borg/borg-16?rev=4856 ältere Version] der Borg16-Firmware, die es vor der [[Borgware-2D]] gab. Derzeit ist das MCUF-Modul noch nicht auf die Borgware-2D portiert.''' | ||
Peter hat ein MCUF-Modul geschrieben (zu finden im svn). Damit steht die Fülle der Blinkenlight-Apps für den Borg offen. | Peter hat ein MCUF-Modul geschrieben (zu finden im svn). Damit steht die Fülle der Blinkenlight-Apps für den Borg offen. | ||
| Zeile 297: | Zeile 641: | ||
=Downloads= | =Downloads= | ||
*[ | *[https://github.com/das-labor/legacy/tree/master/hardware/borg16 Hardware on Github] | ||
* | *[https://github.com/das-labor/borgware-2d Borgware-2D on Github] | ||
*[[Medium:Borg16_firmware.zip|vorgefertigte Firmware-Images]] mit und ohne seriellen Bootloadern (bitte die [[#Vorgefertigte_Firmware-Images|Hinweise]] beachten) | |||
=Bestellen= | =Bestellen= | ||
<!--Platinen zur Zeit leider ausverkauft.<br> Bei interesse an einer Vorbestellung bitte auf die Borg16-Mailingliste schreiben.--> | <!--Platinen zur Zeit leider ausverkauft.<br> Bei interesse an einer Vorbestellung bitte auf die Borg16-Mailingliste schreiben.--> | ||
| Zeile 315: | Zeile 661: | ||
*http://hansmi.ch/hardware/borg16 | *http://hansmi.ch/hardware/borg16 | ||
*http://blog.blinkenarea.org/index.php/2008/10/17/blinken-in-the-air/ | *http://blog.blinkenarea.org/index.php/2008/10/17/blinken-in-the-air/ | ||
*http://www.werkzeugh.at/?p=283 | *http://www.werkzeugh.at/?p=283 | ||
*http://www.mikrocontroller.net/topic/147689 | *http://www.mikrocontroller.net/topic/147689 | ||
*http:// | *http://wiki.ctdo.de/projekte/borg16 | ||
*http:// | *http://www.wischcenter.de/pic01.html – Web Cam in einem Hamburger Schaufenster: Ein Borg16 ist in der Spiegelung zu sehen. | ||
[[Kategorie:BlinkenBorg]] | [[Kategorie:BlinkenBorg]] | ||
[[Kategorie:Microcontroller]] | [[Kategorie:Microcontroller]] | ||
Aktuelle Version vom 8. April 2017, 00:02 Uhr
| Borg16 Release status: stable [box doku] | |
|---|---|

| |
| Description | Ein 256-LED Displaycontroller |
| Author(s) | Various, Tunix, (Suschman) |
| Last Version | 2.0 () |
| Platform | AVR (ATmega32) |
| Download | Software: Github Hardware: SVN browse |
About[Bearbeiten | Quelltext bearbeiten]
Der Borg16 basiert auf Andrés originalem 16×16-Borg und umfasst eine professionell hergestellte Platine zur Ansteuerung von 256 LEDs. Üblicherweise sind diese als eine Matrix von 16x16 LEDs angeordnet, aber auch andere Formate sind möglich. Sie verfügt über eine serielle Schnittelle und einen Anschluss für einen Joystick im 9-Pin Atari-Standard. Zusätzlich bietet die Platine Platz für einen CAN-Bus-Controller oder ein RMF12-Funkmodul zur Vernetzung.
Die Borgware-2D kann die LEDs mit vier Helligkeitsstufen ansteuern. Es existiert bereits eine breite Palette an Spielen, Demos und Testprogrammen. Der Simulator ermöglicht zudem die Entwicklung neuer Software auch ohne die Hardware. Die Leerplatine samt Bauteile für den Borg16 gibt es im Labor als Bausatz zu kaufen.
Tunix hat auf den Labortagen 2012 einen Vortrag über den Borg16 gehalten. Es gibt davon eine Videoaufzeichnung, allerdings sind einige Punkte mittlerweile veraltet, daher ist es sinnvoller, die aktualisierten Folien weiter unten zu Rate zu ziehen.
- Folien des Vortrages (fehlerbereinigt und aktualisiert auf den Stand von November 2014)
- vorgefertigte Firmware-Images mit und ohne seriellen Bootloadern (bitte die Hinweise beachten)
- Video: Borg16 - Getting started — Informationen mittlerweile veraltet, teilweise böse Fehler auf den Folien
Aufbau[Bearbeiten | Quelltext bearbeiten]
Borg16v1[Bearbeiten | Quelltext bearbeiten]
Die ursprüngliche Borg16-Platine von 2006 mit optionaler CAN-Unterstützung und ausschließlich bedrahteten Bauteilen.
Mittlerweile vergriffen! Aber es sind noch genug Borg16v2-Platinen vorhanden.




Bestückungsliste[Bearbeiten | Quelltext bearbeiten]
| Position | Bauteil | Wert/Typ | Bemerkung |
|---|---|---|---|
| C1 | Elektrolyt-Kondensator | 330µF | |
| C2 | Keramik-Kondensator | 100nF | |
| C3 | Keramik-Kondensator | 100nF | |
| C4 | Keramik-Kondensator | 100nF | wird nicht bestückt |
| C5 | Keramik-Kondensator | 100nF | |
| C6 | Keramik-Kondensator | 18pF | |
| C7 | Keramik-Kondensator | 18pF | |
| CAN | Stift- oder Sockelleiste | 1×3 | |
| COL | Wannenbuchse 16pol. | 2×8 | |
| D1 | Kleinsignal-Diode | 1N4148 | Glasgehäuse, Anschlüsse vorsichtig biegen |
| D2 | Gleichrichter-Diode | 1N4004 | alternativ 1N4007 |
| IC1 | Treiber-IC | UDN2981A | alternativ TD62783AP |
| IC2 | Treiber-IC | UDN2981A | alternativ TD62783AP |
| IC3 | Schieberegister-IC | 74HCT164N | |
| IC4 | Schieberegister-IC | 74HCT164N | |
| IC5 | IC-Sockel | 40 polig: 2×20 | optional, aber sehr empfehlenswert |
| IC5 | Mikrocontroller | ATmega32(A) | alternativ ATmega324/644/1284(A/P/PA) |
| IC6 | CAN-Controller-IC | MCP2515P | alternativ MCP2510P |
| IC7 | CAN-Transceiver-IC | MCP2551P | |
| ISP | Stiftleiste | 2×5 | |
| JOY | Sub-D9 Male | ||
| LED3 | LED | 3mm, gelb, diffus | |
| PWR | Hohlsteckerbuchse | außen 6,3mm/innen 2,0mm | mit Lötfahnen |
| R01-R16 | Vorwiderstände | siehe Text | |
| R17 | Kohleschichtwiderstand | 10kΩ | |
| R18 | Kohleschichtwiderstand | 10kΩ | |
| R19 | Kohleschichtwiderstand | 10kΩ | |
| R20 | Kohleschichtwiderstand | 1kΩ | |
| R21 | Kohleschichtwiderstand | 1kΩ | |
| R22 | Kohleschichtwiderstand | 1kΩ | |
| R23 | Kohleschichtwiderstand | 1kΩ | |
| R24 | Kohleschichtwiderstand | 33kΩ | |
| RESET | Kurzhubtaster | ||
| ROW | Wannenbuchse 16pol. | 2×8 | |
| RS232 | Sub-D9 Female | ||
| T01-T16 | MOSFET | IRLD024 | |
| T17 | NPN-Transistor | BC547B | |
| T18 | NPN-Transistor | BC547B | |
| X1 | Schwingquarz | HC49/U 16 MHz |
Borg16v2[Bearbeiten | Quelltext bearbeiten]
Die aktuelle Borg16-Platine von 2009, die optional auch ein RFM12-Funkmodul aufnehmen kann. Aus Platzgründen bedürfen die (optionalen) CAN-Bauteile nun der SMD-Bauform. Die restlichen Komponenten sind wie gehabt bedrahtet. Noch in großer Stückzahl erhältlich.
Diesen Bausatz (Leerplatine mit oder ohne Bauteilen) gibt es auch im Labor zu kaufen.
Wer die Bauteile selbst besorgen möchte, für den gibt es hier die entsprechenden Reichelt-Artikelnummern bzw. Warenkörbe.






Bestückungsliste[Bearbeiten | Quelltext bearbeiten]
| Position | Bauteil | Wert/Typ | Bemerkung |
|---|---|---|---|
| C1 | Elektrolyt-Kondensator | 470µF | |
| C2 | Keramik-Kondensator | 100nF | |
| C3 | Keramik-Kondensator | 100nF | |
| C4 | Keramik-Kondensator | 100nF | wird nicht bestückt |
| C5 | Keramik-Kondensator | 100nF | |
| C6 | Keramik-Kondensator | 22pF | |
| C7 | Keramik-Kondensator | 22pF | |
| D1 | Kleinsignal-Diode | 1N4148 | Glasgehäuse, Anschlüsse vorsichtig biegen |
| D2 | Gleichrichter-Diode | 1N4004 | alternativ 1N4007 |
| IC1 | Treiber-IC | UDN2981A | alternativ TD62783AP |
| IC2 | Treiber-IC | UDN2981A | alternativ TD62783AP |
| IC3 | Schieberegister-IC | 74HCT164N | |
| IC4 | Schieberegister-IC | 74HCT164N | |
| IC5 | IC-Sockel | 40 polig: 2×20 | optional, aber sehr empfehlenswert |
| IC5 | Mikrocontroller | ATmega32(A) | alternativ ATmega324/644/1284(A/P/PA) |
| R01-R16 | Vorwiderstände | siehe Text | |
| R18 | Kohleschichtwiderstand | 10kΩ | |
| R19 | Kohleschichtwiderstand | 10kΩ | |
| R20 | Kohleschichtwiderstand | 1kΩ | |
| R21 | Kohleschichtwiderstand | 1kΩ | |
| R26 | Kohleschichtwiderstand | 1kΩ | |
| T01-T16 | MOSFET | IRLD024 | |
| T17 | NPN-Transistor | BC547B | |
| T18 | NPN-Transistor | BC547B | |
| X1 | Schwingquarz | HC49/U 16 MHz | |
| LED3 | LED | 3mm, gelb, diffus | |
| RESET | Kurzhubtaster | ||
| ROW | Wannenbuchse 16pol. | 2×8 | |
| COL | Wannenbuchse 16pol. | 2×8 | |
| RS232 | Sub-D9 Female | ||
| ISP | Stiftleiste | 2×5 | |
| JOY | Sub-D9 Male | ||
| PWR | Hohlsteckerbuchse | außen 6,3mm/innen 2,0mm | mit Lötfahnen |
Optionale Borg16v2 CAN-Bestückungsliste:[Bearbeiten | Quelltext bearbeiten]
| Position | Bauteil | Wert | Bemerkung |
|---|---|---|---|
| CAN | Stift- oder Sockelleiste | 1×3 | |
| IC6 | CAN-Controller-IC | MCP 2515-I/SO | SMD, Rückseite der Platine |
| IC7 | CAN-Transceiver-IC | MCP 2551-I/SN | SMD, Rückseite der Platine |
| LED1 | LED | 5mm, grün, diffus | |
| LED2 | LED | 5mm, rot, diffus | |
| R17 | Kohleschichtwiderstand | 10kΩ | |
| R22 | Kohleschichtwiderstand | 1kΩ | |
| R23 | Kohleschichtwiderstand | 1kΩ | |
| R24 | SMD-Widerstand | 33kΩ | SMD, Rückseite der Platine |
Optionale Borg16v2 RFM12-Bestückungsliste[Bearbeiten | Quelltext bearbeiten]
| Position | Bauteil | Wert | Bemerkung |
|---|---|---|---|
| ANT | ca 17,5cm Kabel | ||
| IC8 | Funk-IC | RFM12 | |
| R25 | Kohleschichtwiderstand | 10kΩ |
Die RFM12 und CAN Optionen schliessen sich leider gegenseitig aus, es geht immer nur eines von beidem!
Bestückung[Bearbeiten | Quelltext bearbeiten]
Die Bestückung der Platine läuft, wenn du schon einmal einen Bausatz zusammengelötet hast, nach dem bekannten Schema ab. Sollte dies dein erstes Bauprojekt sein, empfiehlt es sich das Tutorial von Microcontroller.net zu lesen. Um die gröbsten Anfängerfehler zu vermeiden, sind hier nochmal die grundlegendsten Vorgehensweisen beim Löten zusammengefasst.
Löthinweise für Anfänger[Bearbeiten | Quelltext bearbeiten]
Für Lötanfänger ist es sinnvoll, bleihaltiges Lot zu verwenden, da es bei der Verarbeitung etwas tolerantere Temperatur- und Zeitfenster hat. Zudem lassen sich bei bleihaltigem Lot gelungene Lötverbindungen leicht an ihrem Glanz erkennen, während matte Lötverbindungen kalte Lötstellen anzeigen. Bleifreies Lot erzeugt dagegen immer matte Lötstellen, was die optische Unterscheidung zwischen guten oder schlechten Lötverbindungen erschwert.
Dünner Lötdraht mit 0,5mm Dicke lässt sich einfacher dosieren als Drähte mit 0,75mm oder gar mehr. Steht eine temperaturgereregelte Lötstation zur Verfügung, so ist diese auf etwa 340°C einzustellen.
Die Bauteile werden von oben (also von der Seite mit dem Bestückungsdruck) durch die Platine gesteckt. Bei Bauteilen mit zwei Anschlüssen ist es für einen besseren Halt hilfreich, die Anschlussdrähte leicht nach außen zu biegen. Anschließend die Platine mit der nach unten zeigenden Oberseite auf den Tisch legen, so dass das Bauteil nicht herausfallen kann, und gegebenenfalls überstehende Drahtenden mit einem Seitenschneider auf etwa 1-2mm kürzen.
Nun mit der sauberen Lötspitze sowohl Lötauge als auch Anschlussdraht (bzw. Pin) gleichmäßig für etwa ein bis zwei Sekunden erhitzen und dann den Lötdraht zuführen, und zwar dem Pin oder dem Lötauge, nicht direkt der Lötspitze, da sich die Flussmittelseele sonst zu schnell verflüchtigt. Sobald das Lötauge und der Pin vollständig vom Lot umflossen sind, Lötkolben und Draht von der Lötstelle nehmen und das Lot ein paar Sekunden aushärten lassen (keine Erschütterungen verursachen).
Niemals versuchen, auf der Lötspitze verbliebenes Lot auf einen Pin oder ein Lötauge abzustreifen, da dort bereits alles an Flussmittel verdampft ist, was ursprünglich im Lötdraht enthalten war. Solches Lot oxidiert sofort, wodurch es breiartig, matt und schlecht leitend wird, ein Garant für kalte Lötstellen. So etwas gehört auf den Abstreifschwamm, nicht auf die Platine. Gleiches gilt, wenn sich beim Löten plötzlich größere Kugeln oder Klumpen an der Lötspitze bilden, die nicht auf die Lötstelle abfließen wollen. Ursachen für solche Kugeln sind oft ein zu lange andauernder Lötvorgang oder ein zu heiß eingestellter Lötkolben, in manchen Fällen auch minderwertiger Lötdraht mit zu wenig Flussmittel.
ICs werden in der Regel mit leicht nach außen angewinkelten Pins ausgeliefert, so dass sie sich nicht ohne weiteres in die Platine einsetzen lassen. Die Pins keinesfalls einzeln von Hand zurecht biegen, da die Gefahr besteht, sie dabei umzuknicken, abzubrechen und das Bauteil unbrauchbar zu machen. Stattdessen die Pin-Reihen in ihrer Gesamtheit von jeder Seite vorsichtig an der Tischkante nach innen drücken. Dies gegebenenfalls so oft wiederholen, bis der IC in die Platine passt. Wem das zu unhandlich ist: Im Fachhandel gibt es im einstelligen Eurobereich auch spezielle Pin-Ausrichter zu kaufen.
Um ICs, IC-Sockel oder Wannenstecker (beziehungsweise generell Bauteile mit vielen Pins) möglichst plan aufliegend auf der Platine zu befestigen, zunächst nur einen einzigen Pin in einer äußeren Ecke des Bauteils verlöten. Anschließend die Platine in die Hand nehmen und das Bauteil flächig gegen die Platine drücken und gedrückt halten. Von der anderen Seite mit dem Lötkolben die zuvor hergestellte Lötverbindung noch einmal verflüssigen. Typischerweise ergibt sich dann ein kurzes Einrastgeräusch und das Bauteil ist ausgerichtet. Es ist wichtig, dem Lot ein paar Sekunden zum Aushärten zu geben, bevor man den Druck vom Bauteil nimmt. Nun die restlichen Pins ganz normal verlöten, ausgehend vom schräg gegenüber liegenden Pin.
Empfohlene Reihenfolge[Bearbeiten | Quelltext bearbeiten]
Generell fängt man mit den flachsten Bauteilen an und arbeitet sich nach und nach zu den nächstgrößeren Bauteilen vor. Folgende Reihenfolge hat sich bewährt:
- die Widerstände R01 bis R16, R18 bis R21 und R26
- sofern vorhanden, der Sockel für den Mikrocontroller (IC5)
- Treiber-ICs (IC1 und IC2) und Schieberegister-ICs (IC3 und IC4)
- falls kein Sockel zum Einsatz kommt, der Mikrocontoller (IC5)
- Achtung: die ICs entsprechend der im Bestückungsdruck markierten Einkerbung orientieren, einen falsch eingelöteten IC wieder zu entfernen ist aufwändig und belastet sowohl die Bauteile als auch die Platine
- die Zeilentreiber in Form der IRLD024-MOSFETs (T1 bis T16); deren großer Doppelpin zeigt dabei in Richtung der Wannenstecker
- Gleichrichterdiode 1N4007 (D2) für den Verpolungsschutz, der Ring muss in Richtung des Strichs auf dem Bestückungsdruck zeigen
- Schwingquarz mit 16 MHz (X1)
- die Kondensatoren 22pF (C6, C7) und 100nF (C2, C3, C5); C4 wird nicht bestückt
- gelbe 3mm LED (LED3), den abgeflachten Kragen entsprechend dem Bestückungsdruck orientieren
- die Diode 1N4148 (D1) wird stehend festgelötet, dabei zeigt der schwarze Ring auf dem Bauteil in Richtung des Strichs auf dem Bestückungsdruck; Vorsicht beim Biegen der Beinchen, da das Glasgehäuse dieser Diode schnell bricht
- die beiden BC547B-Transistoren (T17 und T18)
- Reset-Taster (RESET)
- die ISP-Steckerleiste (ISP)
- die beiden Wannenstecker an ROW und COL; Pin 1 dieser Stecker ist mit einem aufgeprägten Dreieck markiert, bitte entsprechend dem Bestückungsdruck orientieren
- Hohlsteckerbuchse (PWR)
- die Sub-D Anschlüsse (JOY und RS232), der Stecker (männlich) an JOY, die Buchse (weiblich) an RS232
- der Elektrolyt-Kondensator mit 470µF (C1); bitte auf die Polung achten und den am Kondensatorgehäuse mit einem Minus markierten Pin nicht in den Pluspol der Platine stecken (im Bestückungsdruck mit einem + markiert)
LED Matrix[Bearbeiten | Quelltext bearbeiten]
Die Zeilen bilden jeweils eine gemeinsame Kathode, die Spalten jeweils eine gemeinsame Anode. Bei einer korrekt aufgebauten Matrix (Draufsicht von vorne) liegen die "Pin 1"-Leitungen der Spalten und Zeilen in der rechten oberen Ecke (von hinten drauf geschaut also links oben). Die Borgware kann einen spiegelverkehrten Aufbau mittels der Option Borg Hardware/Borg16 port setup/reverse cols in Software ausgleichen. Dies kostet allerdings Rechenzeit, was sich u.a. in langsameren Plasma-Animationen zeigt. Besser gar nicht erst falsch verdrahten.
Sofern ihr die Matrix direkt aus den Beinchen der LEDs aufbauen wollt, empfiehlt es sich, die Zeilen zuerst zu verlöten, da die Kathoden kürzer sind. Die Spalten mit den längeren Anoden lassen sich dann leichter über die Zeilen hinweg verlegen, ohne einen Kurzschluss zu verursachen.
Für den Bau des eigentlichen Displays eignen sich LEDs beliebiger Größe (zB. 3mm, 5mm, 10mm Durchmesser) und Farbe. Nur blaue und weiße LEDs haben eine zu hohe Dropout-Spannung, wer sie unbedingt verwenden will muss die Steuerung mit 6V betreiben. Wichtig ist es, nicht zu sparsam zu sein und LEDs mit 400mcd Helligkeit oder mehr zu verwenden, keine low-cost oder preiswerte Standardware. Diese verkraften die hohen Pulsströme nicht und leuchten sehr dunkel.
(Hier Beispielliste möglicher Led-Widerstand Kombinationen eintragen - WIP)
- Osram 3mm Kingbright Amberfarben - 22 Ohm ??
- Osram 5mm Kingbright Rot (Reichelt Bestellnummer "LED 5-4500 RT") - 12 Ohm
- Osram 10mm Kingbright Rot (Reichelt Bestellnummer "LED 10-4500 RT") - 12 Ohm
LED Vorwiderstand berechnen[Bearbeiten | Quelltext bearbeiten]
Über die Treibertransistoren gehen ca. 1,5 bis 2V (UTreiber) verloren. Die Spannung über den Vorwiderstand kann also mit
UR = UBetrieb - UTreiber - ULED berechnet werden.
Beispiel: Wir gehen von einer Betriebsspannung von 5V aus. Rote LEDs haben einen Spannungsabfall von 2V, an den Treiberbausteinen fallen ebenfalls 2V ab.
UR = 5V - 2V - 2V = 1V
Der Vorwiderstand berechnet sich nun nach dem Ohm'schen Gesetz R=U/I. Für einen LED-Pulsstrom von 100mA:
R = 1V / 0,1A = 10Ω
Da die LEDs mit 1/16 Einschaltdauer (6,25% Duty Cycle) bei ca. 120Hz angesteuert werden, kann man ihnen ruhig Überstrom geben.
Das Datenblatt sagt genaueres dazu, wieviel erlaubt ist. Alle LEDs sollten mindestens 50mA vertragen können.
Die Schaltung kann mit passendem Vorwiderstand Pulse von bis zu 120mA erzeugen. Dann muss das Netzteil aber auch knapp 2A (16×120mA) liefern können.
Im Falle blauer oder weißer LEDs veträgt die Schaltung auch eine Betriebsspannung von 6V, damit die LEDs strotz der Spannungsabfälle über die Treiber noch ihre 3,5V bekommen. Noch höher sollte man die Versorgungsspannung aber nicht machen, weil sonst der Mikrokontrolller oder andere Teile leiden könnten.
Zum Berechnen des Widerstandes gibt es auch einen praktischen Vorwiderstandsrechner.
Gehäuseideen[Bearbeiten | Quelltext bearbeiten]
- Ikea Bilderrahmen RIBBA in der Größe 50x50x4.5 cm
- LEDs auf Lochrasterplatinen verlöten und milchtransparentes Plexiglas mit Distanzhülsen befestigen (der André-Borg ist so gebaut)
- Marcus hat eine detaillierte Bauanleitung für seinen RainbowBorg geschrieben
- Tunix hat eine detaillierte Bauanleitung für den CTDO-Borg geschrieben
Plexiglas gibt es beim stegplattenshop.com (kostenloser Zuschnitt!) in Castrop-Rauxel oder bei Ebay, Handelsbezeichnung "PLexiglas XT Opal Weis" in unterschiedlichen Graden an Lichtdurchlässigkeit. Etwas teurer ist der Plexiglas-Shop von Evonik, der allerdings auch ausgefallenere Materialien wie das schwarze 9H04-truLED-Plexiglas führt.
Günstige LEDs in verschiedenen Farben und Größen gibt es bei www.easyseller24.de. Es handelt sich dabei um B-Ware (siehe Marcus' Bauanleitung für Details), allerdings ist die Qualität der LEDs für einen Borg gemeinhin ausreichend.
Wer für seine Gehäusekonstruktion eine Trägerplatte für die LEDs benötigt und diese nicht selber fräsen möchte, kann sich im Baumarkt nach gelochten Faserplatten (MDF oder HDF) umschauen. Selbst wenn der Lochdurchmesser für die jeweiligen LEDs nicht ausreicht, lassen sich solche Platten relativ einfach nachbohren, da das Anzeichnen entfällt und sich der Bohrer wegen der bestehenden Löcher einfacher ansetzen lässt. Auch kann sich ein Blick bei Händlern von Akustikplatten lohnen, die u.a. die Fertigung von gelochten Platten nach Maß anbieten, was sie sich dann aber auch entsprechend bezahlen lassen.
Programmieren[Bearbeiten | Quelltext bearbeiten]
Der Borg16 lässt sich ganz normal über die ISP-Schnittstelle mit STK200-Belegung programmieren, wie sie üblicherweise bei USBasp-Programmiergeräten zu finden ist. In der Draufsicht der Platine ist Pin 1 für den ISP rechts oben, sofern die Anschlüsse PW, JOY und RS232 zu einem selbst zeigen.
Bei erstmaliger Inbetriebnahme eines ATMega muss der SLOW-Jumper (J3) des USBasp gesetzt sein. Dies hängt damit zusammen, dass ein ATMega im Auslieferungszustand zunächst mit einem internen Taktgeber von 1 MHz arbeitet und der USBasp die Daten sonst zu schnell über die ISP-Schnittstelle übertragen würde. Bei USBasp-Varianten ohne SLOW-Jumper hilft die zusätzliche Angabe der Option '-B 4' in avrdude. Sobald der externe Taktgeber über die Fuses (siehe unten) konfiguriert ist, sind der SLOW-Jumper oder die besagte Option nicht mehr notwendig.
Fuses[Bearbeiten | Quelltext bearbeiten]
Ein fabrikneuer ATmega-Mikrocontroller bedarf vor der ersten Verwendung einer einmaligen Konfiguration, damit er mit der restlichen Hardware der Borg16-Platine harmoniert. Dies geschieht über sogenannte Fuses, als Bytes ausgelegte Werte, deren Bits bestimmte Eigenschaften des Controllers beeinflussen. Wir unterscheiden zwischen der lfuse, der hfuse und bei den ATMega*4-Controllern zusätzlich der efuse, die sich mit Hilfe eines Programmiergerätes ändern lassen. Die genaue Bedeutung der einzelnen Fuse-Werte lässt sich aus dem Datenblatt des jeweiligen Mikrocontrollers entnehmen. Konkret stellen wir bei den ATmegas folgendes ein:
- Nutzung eines externen Schwingquarzes mit 16 MHz
- EEPROM-Inhalte bleiben beim Flashen erhalten
- Bootloader nutzen (optional)
- Bootloadergröße von 512 Words (1024 Bytes)
- serielle Programmierung über ISP-Schnittstelle zulassen
- Brown-out Detection bei ca. 4,3 Volt, damit der Controller bei Unterspannung den Betrieb einstellt, bevor er Quatsch macht
Die folgenden beiden Tabellen geben die richtigen Fuse-Werte für alle derzeit auf dem Borg16 unterstützten Mikrocontroller an. Welche Tabelle die richtige ist, hängt davon ab, ob zum Progammieren des Boards ausschließlich ein Programmiergerät oder die serielle Schnittstelle zum Einsatz kommen soll, wobei letztere einen seriellen Bootloader benötigt.
Ohne Bootloader (Firmware wird ausschließlich über ein Programmiergerät übertragen)
| Controller | lfuse | hfuse | efuse | avrdude-Befehl für USBasp (Copy-Paste) |
|---|---|---|---|---|
| ATmega32 | 0x2f | 0xc5 | - | avrdude -c usbasp -p m32 -U lfuse:w:0x2f:m -U hfuse:w:0xc5:m
|
| ATmega644 | 0xe7 | 0xd7 | 0xfc | avrdude -c usbasp -p m644 -U lfuse:w:0xe7:m -U hfuse:w:0xd7:m -U efuse:w:0xfc:m
|
| ATmega644P | 0xe7 | 0xd7 | 0xfc | avrdude -c usbasp -p m644p -U lfuse:w:0xe7:m -U hfuse:w:0xd7:m -U efuse:w:0xfc:m
|
| ATmega1284 | 0xe7 | 0xd7 | 0xfc | avrdude -c usbasp -p m1284 -U lfuse:w:0xe7:m -U hfuse:w:0xd7:m -U efuse:w:0xfc:m
|
| ATmega1284P | 0xe7 | 0xd7 | 0xfc | avrdude -c usbasp -p m1284p -U lfuse:w:0xe7:m -U hfuse:w:0xd7:m -U efuse:w:0xfc:m
|
Mit Bootloader (Firmware wird auch über die serielle Schnittstelle übertragen)
| Controller | lfuse | hfuse | efuse | avrdude-Befehl für USBasp (Copy-Paste) |
|---|---|---|---|---|
| ATmega32 | 0x2f | 0xc4 | - | avrdude -c usbasp -p m32 -U lfuse:w:0x2f:m -U hfuse:w:0xc4:m
|
| ATmega644 | 0xe7 | 0xd6 | 0xfc | avrdude -c usbasp -p m644 -U lfuse:w:0xe7:m -U hfuse:w:0xd6:m -U efuse:w:0xfc:m
|
| ATmega644P | 0xe7 | 0xd6 | 0xfc | avrdude -c usbasp -p m644p -U lfuse:w:0xe7:m -U hfuse:w:0xd6:m -U efuse:w:0xfc:m
|
| ATmega1284 | 0xe7 | 0xd6 | 0xfc | avrdude -c usbasp -p m1284 -U lfuse:w:0xe7:m -U hfuse:w:0xd6:m -U efuse:w:0xfc:m
|
| ATmega1284P | 0xe7 | 0xd6 | 0xfc | avrdude -c usbasp -p m1284p -U lfuse:w:0xe7:m -U hfuse:w:0xd6:m -U efuse:w:0xfc:m
|
Wer tiefer in die Materie einsteigen möchte: Der Fuse-Calculator von Engbedded kann die hexadezimalen Werte der Fuses in sprechende Namen übersetzen. Die dort verwendeten Bezeichnungen lassen sich dann bequem im Datenblatt des jeweiligen Controllers nachschlagen.
Vorgefertigte Firmware-Images[Bearbeiten | Quelltext bearbeiten]
Wer sich nicht zutraut, die Borgware-2D selber zu kompilieren oder die neu gebaute Hardware einfach nur schnell mit einer fertigen Firmware testen möchte, kann sich das passende Image aus diesem ZIP-Archiv (Stand 12.10.2014) heraussuchen. Dort finden sich Images für den ATmega32, ATmega644(P) und den ATmega1284(P). Wir weisen an dieser Stelle darauf hin, dass diese Images nur mit Standardversionen des Borg16 funktionieren, die Matrix also wie oben beschrieben korrekt verdrahtet ist (Koordinate [0,0] rechts oben) und ein Quarz mit 16 MHz verwendet wird. Diese Images enthalten keinen CAN- oder RFM12-Support. Bevor es jemand versucht: Die Images sind nicht für den André-Borg und auch nicht für die Borg-Jacke geeignet.
Das Archiv enthält neben den normalen Borgware-2D-Images auch solche mit integriertem seriellen Bootloader, die wir manuell erstellt haben. Wird die Firmware ausschließlich mit einem Programmiergerät wie dem USBasp übertragen, genügen die normalen Images. Soll die Firmware hingegen zukünftig über die serielle Schnittstelle aktualisiert werden, muss mit einem Programmiergerät initial ein Image mit seriellem Bootloader auf den Chip programmiert werden. In den Fuses ist dieser gegebenenfalls einzuschalten. Danach ist das Programmiergerät nicht mehr nötig und es lassen sich normale Images ohne integrierten Bootloader (dieser kann sich ja nicht selbst überschreiben) über die serielle Schnittstelle übertragen. Dazu wartet der Controller nach einem Reset für zwei Sekunden auf eine serielle Verbindung (19200 Baud).
Siehe auch den Abschnitt über serielle Bootloader weiter unten.
Flashen der Firmware mit dem USBasp-Programmiergerät[Bearbeiten | Quelltext bearbeiten]
Dieser Abschnitt geht davon aus, dass bereits ein Firmware-Image mit dem Namen image.hex im aktuellen Verzeichnis vorliegt. Ein solches Image lässt sich mit Hilfe eines eines USBasp-Programmiergerätes folgendermaßen flashen:
| Controller | avrdude-Befehl |
|---|---|
| ATmega32 | avrdude -c usbasp -p m32 -U f:w:image.hex
|
| ATmega644 | avrdude -c usbasp -p m644 -U f:w:image.hex
|
| ATmega644P | avrdude -c usbasp -p m644p -U f:w:image.hex
|
| ATmega1284 | avrdude -c usbasp -p m1284 -U f:w:image.hex
|
| ATmega1284P | avrdude -c usbasp -p m1284p -U f:w:image.hex
|
Dies weißt avrdude an, als Programmiergerät "-c" einen USBasp zu verwenden, als Target "-p" einen ATmega32/644/644P/1284/1284P anzunehmen und eine Speicheroperation "-U" im Flash-ROM "f" durchzuführen, und zwar das Schreiben "w" des Inhalts von "image.hex".
Wird die Firmware direkt mit dem USBasp auf den ATmega übertragen, geht ein eventuell zuvor aufgespielter Bootloader verloren. Das liegt daran, dass das Flash-ROM beim Programmieren über die ISP-Schnittstelle komplett gelöscht wird und in einer frisch kompilierten Borgware 2D kein Bootloader enthalten ist. Dementsprechend ist der Bootloader-Support in den Fuses gegebenenfalls zu deaktivieren. Eine Ausnahme sind die weiter oben beschriebenen, von uns bereitgestellten Images. Dort gibt es Varianten, die wir manuell mit einem zusätzlichen Bootloader versehen haben, so das die Firmware auch nach Nutzung eines Programmiergerätes noch über die serielle Schnittstelle aktualisiert werden kann.
Serieller Bootloader[Bearbeiten | Quelltext bearbeiten]
Der hintere Teil des Flash-ROMs kann per Fuse für einen Bootloader reserviert werden, der nach einem Reset direkt gestartet wird. Er kann dann bei Bedarf die eigentliche Firmware von anderen Quellen wie der seriellen Schnittstelle nachladen und im vorderen Teil des Flash-ROMs abspeichern, ansonsten springt er direkt in die eigentliche Firmware.
In der AVR109 Application Note beschreibt Atmel ein Protokoll zum Programmieren von AVR-Controllern über die serielle Schnittstelle. Dieses Protokoll wird von vielen AVR-zentrischen Werkzeugen (u.a. von avrdude) unterstützt. Unter Zuhilfenahme eines entsprechenden Bootloaders verhält sich der Borg16 dann selbst wie ein serielles Programmiergerät. Mit einem normalen Verlängerungskabel (1-zu-1) oder USB-RS232-Wandler lässt sich das Board dann neu programmieren.
In früher angebotenen Bausätzen haben wir den Foodloader auf dem Mikrocontroller vorinstalliert. Leider ist besagter serieller Bootloader nicht mehr mit neueren Versionen des GNU-C-Compilers kompatibel (Compiler-Fehler bzw. Build sprengt die Größe von 512 Words). Als Alternative empfehlen wir den AVRProg Boot 0.85 von Martin Thomas et al. Die Quellen gibt es hier. Zu dessen Konfiguration sei auf die mitgelieferte Dokumentation und auf den Borg16-Vortrag verwiesen. Durch Verwendung dieses Bootloaders steht der Firmware 1 Kilobyte weniger auf dem Flash-ROM zur Verfügung.
Ein leerer Controller (bzw. ein Controller ohne Bootloader) muss zunächst mittels eines Programmiergeräts über die ISP-Schnittstelle mit einem Bootloader-Image programmiert werden. Ebenfalls sind die Fuses entsprechend anzupassen.
Das Überspielen der Firmware über die serielle Schnittstelle mit 19200 Baud am Beispiel von avrdude:
| Controller | avrdude-Befehl |
|---|---|
| ATmega32 | avrdude -c avr109 -b 19200 -P serialdev -p m32 -U f:w:image.hex
|
| ATmega644 | avrdude -c avr109 -b 19200 -P serialdev -p m644 -U f:w:image.hex
|
| ATmega644P | avrdude -c avr109 -b 19200 -P serialdev -p m644p -U f:w:image.hex
|
| ATmega1284 | avrdude -c avr109 -b 19200 -P serialdev -p m1284 -U f:w:image.hex
|
| ATmega1284P | avrdude -c avr109 -b 19200 -P serialdev -p m1284p -U f:w:image.hex
|
serialdev ist auf den Namen der verwendeten seriellen Schnittstelle zu setzen (z.B. /dev/ttyS0, /dev/ttyUSB0 oder COM1). Damit diese Befehle funktionieren, muss der Mikrocontroller den Bootloader ausführen. In den von uns bereitgestellten Images tut er das nach einem Reset für 2 Sekunden. Dies ist natürlich eine etwas knappe Zeitspanne, um einen avrdude-Befehl abzusetzen. Bequemer ist, mit der UART-Shell einen Reset-Befehl zu senden (siehe dort). Im Gegensatz zur Verwendung eines Programmiergerätes wird das Flash-ROM beim seriellen Update nicht komplett gelöscht und der Bootloader bleibt erhalten (warum sollte er sich auch selber löschen). Daher werden bei dieser Übertragungsart auch keine speziellen Images mit einem eigenen Bootloader benötigt.
Noch ein Hinweis: Fuses lassen sich nicht über den seriellen Bootloader einstellen, dafür ist nach wie vor ein Programmiergerät nötig.
Shell auf der seriellen Schnittstelle[Bearbeiten | Quelltext bearbeiten]
Der Borg16 stellt über die serielle Schnittstelle eine kleine Shell bereit, sofern im Menuconfig die Option Borg-Hardware/Borg16-port-setup/UART-Support angewählt ist (in den Borgware-2D-Versionen ab September 2014). Die Schnittstellenparameter sind standardmäßig folgendermaßen eingestellt:
- 19200 Baud
- 8 Datenbits
- keine Parität
- 1 Stoppbit
- keine Flusskontrolle
Sofern sich (unter Linux) der USB-Konverter unter /dev/ttyUSB0 befindet, kann der Nutzer die Shell folgendermaßen erreichen:
screen /dev/ttyUSB0 19200
Windows-Benutzer können PuTTY verwenden. Dort unter der Kategorie Session den Connection Type Serial anwählen. Anschließend in der Kategorie Serial die oben angegebenen Parameter eintragen.
In beiden Fällen öffnet sich eine Minimal-Shell, die so minimal ist, dass sie keine Cursor-Tasten und auch keine History unterstützt. Backspace ist möglich, Ctrl-L überträgt die aktuelle Eingabe erneut und Ctrl-U löscht die derzeitige Eingabe. Dies ist nützlich, falls die UART beim Einstöpseln des Kabels irgendwelche Zeichen erkennt und man sicher gehen möchte, dass nur die Zeichen den Borg erreichen, die man explizit eingetippt hat.
Folgende Befehle nimmt die Borgware-2D über die serielle Schnittstelle entgegen:
| Befehl | Bedeutung |
|---|---|
erase |
Löscht das EEPROM und damit den Reset-Counter sowie alle Tetris-Hi-Scores. |
help |
Gibt die akzeptierten Befehle aus. |
mode n |
Wechselt in den Modus (gleich Animation) mit der Nummer n (von 0-255). Wird n weggelassen, zeigt die Konsole die aktuelle Modusnummer an. |
msg text |
Gibt text als einen von rechts nach links scrollenden Text aus. |
next |
Springt zur nächsten Animation. |
prev |
Springt zur vorherigen Animation. |
reset |
Startet den Borg neu; nützlich, um eine neue Firmware zu flashen. |
scroll text |
Wie msg, nur das die Texte in der BorgTextAnim-Sprache geschrieben sein müssen. |
test n |
Gibt das Testmuster mit der Nummer n aus. 0≤n≤3 schaltet alle Pixel in der Helligkeitsstufe n ein. n=4 zeichnet ein horizontales Streifenmuster, n=5 ein vertikales. |
Ist der Borg16 mit einem seriellen Bootloader ausgestattet, läßt sich mit der UART-Shell bequem von der Eingabeaufforderung aus ein Reset auslösen und unmittelbar danach der serielle Flashvorgang starten (hier am Beispiel von Linux mit der seriellen Schnittstelle an /dev/ttyUSB0):
stty -F /dev/ttyUSB0 19200
echo -e "\x15reset" >/dev/USB0 && avrdude -c avr109 -P /dev/ttyUSB0 -b 19200 -p atmega32 -U f:w:image.hex
Das "\x15" im echo-Befehl (Option -e nicht vergessen) ist gleichbedeutend mit einem Ctrl-U, so das der Zeichenpuffer garantiert leer ist, bevor der "reset"-Befehl übertragen wird.
Modusnummern[Bearbeiten | Quelltext bearbeiten]
Hier sind die Modusnummern und ihre Bedeutung für den mode-Befehl aufgelistet:
| Nr. | Modus |
|---|---|
| 1 | Lauftext |
| 2 | Spriale |
| 3 | diagonale Linien |
| 4 | Snake-Demo |
| 5 | Schachbrett |
| 6 | Kaminfeuer |
| 7 | CAN-Zeitanzeige (nur im Bochumer Labor mit CAN-Bus sinnvoll) |
| 8 | Matrix |
| 9 | Zufallsrauschen |
| 10 | Fallende Spielfiguren |
| 11 | Game Of Life |
| 12 | Fliegende Punkte |
| 13 | Breakout-Demo |
| 14 | Animationen von Martin Herweg |
| 15 | rotierendes Moiré-Muster |
| 16 | CAN-Zeitanzeige, 2. Slot (nur im Bochumer Labor mit CAN-Bus sinnvoll) |
| 17 | Langton's Ameise |
| 18 | Labor-Logo |
| 19 | hypnotisierende Kröte |
| 20 | Labortage MMXI "Operating Out Of Spec"-Logo |
| 21 | Fairydust-Rakete |
| 22 | Plasma |
| 23 | pulsierende Ringe |
| 24 | schwarzes Loch |
| 25 | schimmernde Rechtecke |
| 26 | DNA |
| 31 | Test: Helligkeitsstufe 1 |
| 32 | Test: Helligkeitsstufe 2 |
| 33 | Test: Helligkeitsstufe 3 |
| 35 | Test: Farbpalette |
| 36 | wandernde Zeile |
| 37 | wandernde Spalte |
| 38 | wandernde Spalte (bidirektional) |
| 39 | wandernde Zeile (birektional) |
| 253 | Sprung zu Modus 1 |
| 254 | Spielmenü (ACHTUNG: Solange das Menü läuft ist kein Moduswechsel möglich.) |
| 255 | Abschalten der Anzeige (ACHTUNG: Dieser Modus kann nur über die Kommandos mode, next und prev verlassen werden.)
|
Üblicherweise ist nicht jeder Modus in der Firmware konfiguriert. Wird beim mode-Befehl eine nicht vergebene bzw. nicht konfigurierte Modusnummer angegeben, springt die Borgware einfach zum nächsten verfügbaren Modus.
Während der Anzeige des Menüs bzw. während eines Spiels ist kein Moduswechsel möglich.
Troubleshooting[Bearbeiten | Quelltext bearbeiten]
avrdude meldet zusammen mit dem USBasp immer "target doesn't answer"[Bearbeiten | Quelltext bearbeiten]
- Bei fabrikneuen ATmegas sicherstellen, dass beim erstmaligen Setzen der Fuses entweder der Slow-Jumper des USBasps eingeschaltet ist oder die avrdude-Befehlszeile zusätzlich die Option "-B 4" enthält.
- Sicherstellen, dass die Pfostenbuchse des Programmierkabels richtig herum in den ISP-Steckplatz der Platine gesteckt ist.
- Wird die Borg16-Platine ausreichend mit Spannung versorgt? Entweder ein passendes Netzteil an der Borg16-Platine anschließen oder Stromversorgung des USBasps per Jumper zuschalten (aber nicht beides gleichzeitig). Bei einem Netzteil sicher stellen, dass auch wirklich 5 Volt herauskommen.
- Sitzt der Mikrocontroller ordentlich in seinem Sockel? Der ATmega muss plan auf dem Sockel aufliegen, darf nicht wackeln und sich auch nicht an einer Seite abheben. Alle Pins müssen gerade im Sockel stecken (keine Knicke).
- Mikrocontroller falsch herum eingesetzt? Das kann im Eifer des Gefechts schneller passieren, als einem lieb ist. Falls die Kerbe des Chips nicht entsprechend dem Bestückungsdruck orientiert ist, Platine umgehend vom Strom trennen und den ATmega richtig herum einsetzen.
- Tritt der Fehler erst seit dem letzten Setzen der Fuses auf, wurde möglicherweise ein falscher Taktgebertyp eingestellt. Am einfachsten ist es, den Mikrocontroller in eine Entwicklungsplatine einzusetzen, die einen passenden Taktgeber bereit hält und dort die Fuses zu korrigieren. Falls der erwartete Typ des Taktgebers "External Clocksource" ist, lässt sich auch mit Hilfe eines zweiten Mikrocontrollers (z.B. Arduino) ein Taktsignal an einem Port-Pin erzeugen, der wiederum mit dem XTAL1-Pin des Borg16-ATmegas verbunden werden muss. Ist der Borg16-ATmega daraufhin ansprechbar, auch hier sofort die Fuses korrigieren.
- Mikrocontroller defekt? Falls der Controller auch in anderen Platinen versagt, ist Ersatz gefragt.
- Mikrocontroller funktioniert woanders aber nicht in der Borg16-Platine? Sofern nicht der Taktgeber die Ursache ist, nach kalten Lötstellen suchen.
Programmierung mit dem USBasp ist sehr langsam[Bearbeiten | Quelltext bearbeiten]
- Slow-Jumper gesetzt? Dieser ist nach dem Einstellen der (korrekten!) Fuses nicht mehr notwendig.
- Taucht eine Option "-B 4" (oder auch eine andere Zahl als 4) im
avrdude-Kommando auf? Auch diese Option ist nach dem setzen der Fuses unnötig.
Programmierung über die serielle Schnittstelle schlägt fehl[Bearbeiten | Quelltext bearbeiten]
- Ist der Bootloader in den Fuses eingeschaltet? Stimmt die in den Fuses eingestellte Größe des Bootloaders (512 Words im Fall von
avrprogboot)? - Ist auf dem Mikrocontroller überhaupt ein serieller Bootloader aufgespielt? Bei unseren vorgefertigten Firmware-Images gibt es auch Varianten, die einen seriellen Bootloader enthalten.
- Ist die Baudrate korrekt? Die in unseren Firmware-Images enthaltenen Bootloader sind auf 19200 Baud eingestellt (Voraussetzung ist ein Quarz mit 16 MHz).
- Ist eine andere Baudrate als 19200 im Bootloader eingestellt oder wird ein Quarz mit einer anderen Frequenz als 16 MHz verwendet? Dann sicherstellen, dass die Baudrate auch zur Taktfrequenz des Mikrocontrollers passt. ATmegas können Baudraten nur über ganzzahlige Teiler ihrer Taktfrequenz annähern. Weicht diese Näherung um mehr als 0,2% von der tatsächlich geforderten Baudrate ab, wird die serielle Übertragung unzuverlässig. Welche Baudraten zu welchen Taktfrequenzen passen, lässt sich hier entnehmen.
- Wird ein USB-zu-seriell-Konverter benutzt? Die Spannungen an der seriellen Schnittstelle des Borg16 bewegen sich am Rand der Norm, womit nicht jeder USB-Konverter zurecht kommt. Hier hilft es nur, ein anderes Modell zu nehmen. USB-Konverter mit dem Chip PL2303 von Prolific (unter anderem in einem USB-Konverter von Goobay verbaut, bei Reichelt erhältlich) funktionieren mit dem Borg16. Auch echte serielle Schnittstellen (vornehmlich an älteren PCs zu finden) funktionieren tadellos.
Firmware startet unerwartet neu, bleibt stehen oder stürzt mit wildem Geflacker ab[Bearbeiten | Quelltext bearbeiten]
- Handelt es sich um selbst kompilierte/modifizierte Firmware? Wenn ja, einmal mit unserer vorgefertigten Firmware prüfen, ob wirklich ein Hardware-Problem vorliegt.
- Ist das Netzteil richtig dimensioniert? Je nach verbauten LEDs muss das Netzteil Ströme von bis zu 2A (bei 120mA pro LED) liefern können, ohne das die Versorgungsspannung absinkt. Fällt die Spannung unter 4,3V (bzw. 4,0V bei ATmega32), hält die Brownout-Detection den Prozessor an und startet ihn neu, sobald die Spannung wieder hoch genug ist. Da dabei alle LEDs abgeschaltet werden, ist die Unterspannungssituation meist umgehend vorbei, was den Eindruck eines spontanen Neustarts erweckt.
- Ist die Firmware mit CAN- und/oder RFM12-Support kompiliert worden, obwohl keine dieser Optionen auf der jeweiligen Borg16-Platine verbaut ist? Dies führt meist direkt beim Start zu komischen Abstürzen mit wirrem Geflacker. In dem Fall entweder die Firmware ohne CAN- bzw. RFM12-Support kompilieren oder die vorgefertigte Borg16-Firmware nehmen.
- Etwas im Menuconfig-Tool geändert und vor dem ersten Kompilieren
make cleanvergessen? Das Buildsystem erkennt nicht immer, welche Dateien neu kompiliert werden müssen, wenn Einstellungen im Menuconfig-Tool geändert werden. Einmake cleanstellt sicher, dass alles noch mal neu kompiliert wird. - Brownout-Detection in den Fuses nicht gesetzt? Dann kann es zu Memory-Corruption im EEPROM oder Flash kommen. Ursache dafür ist der beim Einschalten langsame Anstieg der Betriebsspannung auf den Nennwert beziehungsweise der langsame Spannungseinbruch beim Abschalten. Ohne die Brownout-Detection startet der ATmega bereits vor Erreichen der Nennspannung und arbeitet fehlerhaft. Das kann dazu führen, dass er wahllos irgendwelche Werte im EEPROM oder im Flash verändert, insbesondere bei Bootloadern, die über die entsprechende Speicherinstruktionen verfügen. Ob wirklich so ein Problem vorliegt, lasst sich am einfachsten mit einem Verify gegen das verwendete Image prüfen. Steht dies nicht zur Verfügung, hilft oft ein Blick ins EEPROM. Treten nach etwa 200 Bytes (mehr benutzt die Borgware-2D nicht) vereinzelt andere Werte als 0xFF auf, ist dies ein deutlicher Hinweis auf Memory-Corruption. Abhilfe: Die korrekten Fuses mit Brownout-Detection setzen und den Mikrocontroller neu programmieren.
- Möglicherweise ist ein zusätzlicher Abblockkondensator am ATmega-Controller notwendig. Auf den meisten Platinen funktionieren die ATmega-Controller einwandfrei. Allerdings kommt es bei manchen Kombinationen von Controllern, Platinen, Netzteilen und LED-Matrizen vor, dass die Versorgungsspannung des Controllers so stark schwankt, dass kein dauerhafter stabiler Betrieb gewährleistet ist. Typischerweise stürzt die Firmware dann während der Spiral- oder Lagerfeueranimation ab. ATmega644P-Controller sind anfälliger für dieses Problem als andere ATmega-Typen. In so einem Fall hilft es, auf der Rückseite der Platine einen zusätzlichen Keramikkondensator mit 100nF zwischen Pin 10 und 11 des ATmega-Controllers zu löten (siehe Abbildung). Die Beinchen des Keramikkondensators sollten dabei so kurz wie möglich sein, damit er seine volle Wirkung entfalten kann.

Joysticks[Bearbeiten | Quelltext bearbeiten]

{kind=link}
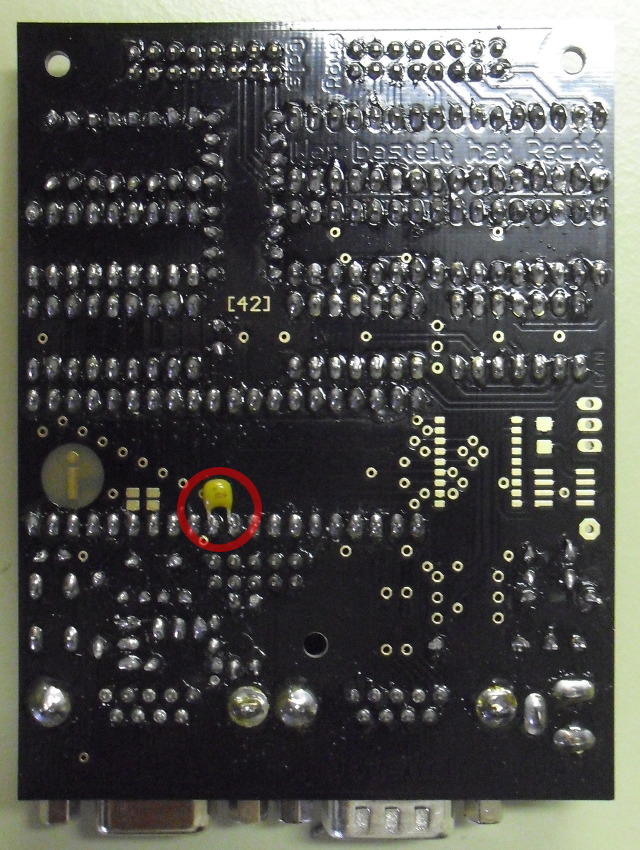{kind=link}
Verwendung finden Joysticks nach dem 9-Pin Atari Standard der 80er, z.B vom C64, Amiga, Atari ST, Atari VCS 2600. Gut und extrem robust sind die "Competition Pro" Joysticks. Gibt es noch recht häufig auf dem Flohmarkt. Wurden aber auch noch mal neu produziert als Competition Pro Retro, zu bekommen unter anderem bei Individual Computers. Eine Alternative ist bspw. ein Gamepad.
Die Spielecontroller sind digital und ziehen den jeweiligen Pin auf GND (siehe hier für Belegung), insofern geht das auch sehr schnell auf einer kleinen Lochrasterplatine.
Ferner ist die Nutzung einer Funkfernbedienung als Joystick möglich (in Arbeit).
Software[Bearbeiten | Quelltext bearbeiten]
Den Quellcode für die Software gibt es bei Github. Für genauere Informationen siehe den Borgware-2D-Artikel.
Module[Bearbeiten | Quelltext bearbeiten]
Spiele[Bearbeiten | Quelltext bearbeiten]
- Tetris — das altbekannte Tetris, mit Highscore-Liste
- Bastet Tetris — gibt dir immer den gerade unpassendsten Stein (angelehnt an Bastet)
- First Person Tetris — nicht der Stein dreht sich, sondern das Spielfeld
- Snake — Du spielst das bekannte Spiel "Snake" auf dem Borg.
- LaborInvaders — ein Spaceinvaders Clone
- Breakout — ein Breakout-Clone, ähnlich Arkanoid
Animationen[Bearbeiten | Quelltext bearbeiten]
- AutoSnake — hier spielt die Snake mit sich selber
- AutoBreakout — Breakout als Animation
- GameOfLife — Conways Spiel des Lebens
- Langtons Ameise - eine Simulation von Langtons Ameise
- Laborlogo — ein scrollendes Laborlogo
- Hypnotoad — ALL GLORY TO THE HYPNOTOAD!
- Matrix — Follow the white rabbit…
- Kaminfeuer — es wärmt in kalten Nächten
- Zufallsgenerator — nach etwas Getüftel tut es der Zufallsgenerator recht gut, dies kann man hier betrachten
- Laufschrift — ein frei programmierbarer Scrolltext, nutzt BorgTextAnim
- Counter — der Counter zählt die Neustarts der Platine hoch
- Testprogramme
- Wechselndes Schachbrettmuster
- Wandernde Linien mit Helligkeitswechsel
- Spirale
MCUF-Schnittstelle[Bearbeiten | Quelltext bearbeiten]
ACHTUNG: Das MCUF-Modul bezieht sich auf eine ältere Version der Borg16-Firmware, die es vor der Borgware-2D gab. Derzeit ist das MCUF-Modul noch nicht auf die Borgware-2D portiert.
Peter hat ein MCUF-Modul geschrieben (zu finden im svn). Damit steht die Fülle der Blinkenlight-Apps für den Borg offen. Mit Hilfe von BlinkenOutput kann man über das serielle Interface MCUF-Pakete an den Borg schicken.
ich hab das ganze mit meinem 2m-Aufblas-Borg unter Mac OS X zum Laufen gebracht.
meine Kommandos dafür:
./BlinkenOutput -d /dev/tty.usbserial -s 115200,N,8,1 ./BlinkenSend -i ../examples/static.bml -l 0
wichtig: die MCUF-Pakete müssen als Graustufenwerte 8bit (0-255) festgelegt werden (header im .bml-file: <blm width="16" height="16" bits="8" channels="1"> )
Downloads[Bearbeiten | Quelltext bearbeiten]
- Hardware on Github
- Borgware-2D on Github
- vorgefertigte Firmware-Images mit und ohne seriellen Bootloadern (bitte die Hinweise beachten)
Bestellen[Bearbeiten | Quelltext bearbeiten]
Es sind noch einige Borg16V2 Platinen vorhanden. Stückpreis liegt bei 14 Euro.
Bei interesse melde dich einfach auf der Mailingliste, oder komm vorbei :-).
Mailingliste[Bearbeiten | Quelltext bearbeiten]
- Webinterface: http://www.das-labor.org/mailman/listinfo/borg16
- Anmelden: Mail an borg16-request@das-labor.org mit "subscribe" im body.
- Für Fragen, Diskussion, Mailorder, und den ganzen Rest.
Links im Netz[Bearbeiten | Quelltext bearbeiten]
Hier sind ein paar Links zu Webseiten die sich mit dem Borg16 beschäftigen, hier und da gibt es spannende Software für das Display zu entdecken...
- http://hansmi.ch/hardware/borg16
- http://blog.blinkenarea.org/index.php/2008/10/17/blinken-in-the-air/
- http://www.werkzeugh.at/?p=283
- http://www.mikrocontroller.net/topic/147689
- http://wiki.ctdo.de/projekte/borg16
- http://www.wischcenter.de/pic01.html – Web Cam in einem Hamburger Schaufenster: Ein Borg16 ist in der Spiegelung zu sehen.