Laserprojector: Unterschied zwischen den Versionen
Siro (Diskussion | Beiträge) K (bauteilliste hinzugefügt) |
Siro (Diskussion | Beiträge) KKeine Bearbeitungszusammenfassung |
||
| Zeile 24: | Zeile 24: | ||
An den Motoren sind Spiegel befestigt. Der Laserstrahl trifft auf den ersten Spiegel und wird von dort zur zweiten reflektiert. Der erste sorgt für die vertikale Ablenkung, der zweite für die horizontale. Durch Pulsung des Lasers kann ein Bild projektiert werden.<br /> | An den Motoren sind Spiegel befestigt. Der Laserstrahl trifft auf den ersten Spiegel und wird von dort zur zweiten reflektiert. Der erste sorgt für die vertikale Ablenkung, der zweite für die horizontale. Durch Pulsung des Lasers kann ein Bild projektiert werden.<br /> | ||
<h3> | <h3>Übersicht</h3> | ||
< | <gallery> | ||
OpAmp TL072D | Datei:Overview.jpg|Übersicht Laserprojector ICs & IOs | ||
</gallery> | |||
<h3>Syncronisationseinheit</h3> | |||
Detektiert die Position des Laserstrahls<br> | |||
<b>Bauteile</b> | |||
2x OpAmp TL072D | |||
2x 1k | 2x 1k | ||
2x 220 | 2x 220 | ||
| Zeile 37: | Zeile 43: | ||
2x BPX81 | 2x BPX81 | ||
2x SFH400 | 2x SFH400 | ||
<i>Besser ein Transimpedanzwandler, anstelle eines Spannungsteilers verwenden</i><br> | <i>Besser ein Transimpedanzwandler, anstelle eines Spannungsteilers verwenden</i><br> | ||
<gallery> | <gallery> | ||
| Zeile 86: | Zeile 79: | ||
Auf dem GLCD sind Messwerte zu sehen, mit der Tastertur lassen sich Variablen verändern. Der H-Motor (Epson Laser-unit) benötigt ein TTL Signal zum regulieren der Motorgeschwindigkeit. Das ATX-Netzteil dient als Stromversorgung für alle Komponenten außer dem Kontrollboard. Dieses wird durch die Standby-Stromquelle des Netzteils betrieben. Wird der Taster an der Front des Gehäuses betätigt, schaltet der Atmega das ATX-Netzteil ein( o. aus). Das ATX-Netzteil versorgt GLCD, Tastertur, Motor, ... mit Spannung. | Auf dem GLCD sind Messwerte zu sehen, mit der Tastertur lassen sich Variablen verändern. Der H-Motor (Epson Laser-unit) benötigt ein TTL Signal zum regulieren der Motorgeschwindigkeit. Das ATX-Netzteil dient als Stromversorgung für alle Komponenten außer dem Kontrollboard. Dieses wird durch die Standby-Stromquelle des Netzteils betrieben. Wird der Taster an der Front des Gehäuses betätigt, schaltet der Atmega das ATX-Netzteil ein( o. aus). Das ATX-Netzteil versorgt GLCD, Tastertur, Motor, ... mit Spannung. | ||
<b>Bauteile</b><br> | |||
1x Atmega32 | |||
... | |||
<gallery> | <gallery> | ||
Datei:Lasercontrol sch.png|Schaltplan des Kontrollboards | Datei:Lasercontrol sch.png|Schaltplan des Kontrollboards | ||
| Zeile 110: | Zeile 107: | ||
<b>STATUS:</b><i> getestet</i> | <b>STATUS:</b><i> getestet</i> | ||
<br> | <br> | ||
<h3>Laserstromversorgung</h3> | <h3>Laserstromversorgung</h3> | ||
Diese Schaltung kann den Strom durch die Laserdiode bis | Diese Schaltung kann den Strom durch die Laserdiode bis zu einigen Mhz regulieren. 8 bit 5V/3.3V paralleler Bus + clock Leitung. Einstellbar sind Offset und Maximalstrom. | ||
Auflösung: 8 bit | Auflösung: 8 bit | ||
Schwingkreis zur Laserausrichtung, Gesamt-optische-leistung muss kleiner 0,005 W sein. | Schwingkreis zur Laserausrichtung, Gesamt-optische-leistung muss kleiner 0,005 W sein. | ||
<b>Bauteile</b><br> | |||
1x DAC908U-ND | |||
1x OpAmp LMH6703 | |||
2x 4.3 OHM 1% | |||
1x 68 ohm | |||
1x 2KOHM | |||
2x 33.2OHM | |||
1x LM358DT - OP AMP | |||
1x resistor array | |||
2x ZDiode 6V | |||
... | |||
'''astabilder Multivibrator:''' | '''astabilder Multivibrator:''' | ||
| Zeile 131: | Zeile 139: | ||
R2 = T2 / (ln(2) * C) = 19,9* 10^-3/ 10^-7 *ln(2) = 28,7 *10^4 = 287k | R2 = T2 / (ln(2) * C) = 19,9* 10^-3/ 10^-7 *ln(2) = 28,7 *10^4 = 287k | ||
R1 = T1 / (ln(2) * C) = 0,1 * 10^-3/ 10^-7 *ln(2) = 0,144 * 10^4 = 14,4k | R1 = T1 / (ln(2) * C) = 0,1 * 10^-3/ 10^-7 *ln(2) = 0,144 * 10^4 = 14,4k | ||
<b>STATUS:</b><i> Entwurf angefertigt</i> | <b>STATUS:</b><i> Entwurf angefertigt</i> | ||
| Zeile 152: | Zeile 159: | ||
<b>STATUS:</b><i>alternative erforderlich (Cortex-M3 ?)</i> | <b>STATUS:</b><i>alternative erforderlich (Cortex-M3 ?)</i> | ||
<br> | <br> | ||
<h3>Laserdiode</h3> | <h3>Laserdiode</h3> | ||
<b>WARNUNG !<br> | <b>WARNUNG !<br> | ||
Version vom 18. November 2010, 17:44 Uhr
| laserprojector Release status: experimental [box doku] | |
|---|---|

| |
| Description | Projektor der 2 sich drehende Spiegel zur Ablenkung eines modulierten Laserstrahls nutzt |
| Author(s) | siro |
| Last Version | 0.2 |
DIY Laser Projector
Idee : Mit möglichsten einfachen Mitteln ein LaserProjector bauen.
Konzept
Atmega steuert 1 schnellen Motor und einen Galvo/Schrittmotor, Keyboard, GLCD, Power-Supply.
An den Motoren sind Spiegel befestigt. Der Laserstrahl trifft auf den ersten Spiegel und wird von dort zur zweiten reflektiert. Der erste sorgt für die vertikale Ablenkung, der zweite für die horizontale. Durch Pulsung des Lasers kann ein Bild projektiert werden.
Übersicht

Übersicht Laserprojector ICs & IOs

Syncronisationseinheit
Detektiert die Position des Laserstrahls
Bauteile
2x OpAmp TL072D 2x 1k 2x 220 8x 100 4x Poti 100k 5x 100n 2x 10n 2x BSS123 2x BAT54 2x BPX81 2x SFH400
Besser ein Transimpedanzwandler, anstelle eines Spannungsteilers verwenden
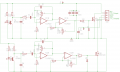
Schaltplan der Syncronisationseinheit

SMD-Board der Syncronisationseinheit


Beschreibung
Die IR-LEDs leuchten auf den Spiegel, wodurch das reflektierte Licht auf die IR-Phototransistoren fällt, wird differenziert, rauschgefiltert und verstärkt. Am Ausgang des OpAmp schneidet eine Diode die negative Spannung ab. Ist diese groß genug, schaltet der FET (BSS123) durch und zieht die Output Leitung auf Masse. Am anderen Ende der Leitung muss ein Pullup-Widerstand sein, der den Strom auf unter 10mA begrenzt.
Versorgungsspannung: 3,7 bis 15 Volt (empfohlen 5 bis 12 Volt).
Berechnung des Tiefpass
Ua = -Ue * R2/R1 * 1 / SQR( 1 + (2*pi*f*R*C)^2 )
Sei 1 / SQR( 1 + (2*pi*f*R*C)^2 ) < 1/Sqr(2) für f > 3000 Hz
1 + (2*pi*f*R*C)^2 < 2
(2*pi*f*R*C)^2 < 1
(2*pi*f*R*C) < 1
RC < 1/2*pi*f
RC < 5,3*10^-5 für f > 3kHz
C = 50nF
Dateien im SVN
STATUS: gebaut, getestet
Syncsensor
Zwei kleine IR-LEDS leuchten dauerhaft auf die rotierenden Spiegel gerichtet. Sobald der reflektierte Lichtstrahl auf die IR-Phototransistoren fällt, wird ein Interrupt am Mikrokontroller ausgelöst.
STATUS: getestet
Sicherheitsboard
Das Sicherheitsboard soll mit verschiedenen Sensoren feststellen, dass sich die Spiegel bewegen, so das die Lichtleistung pro Bildpunkt gering gehalten wird. Bei einem Stopp der Spiegel muss der Laser sofort abgeschaltet werden.
Kontrollboard
An das Kontrollboard werden GLCD, PS/2 - Tastertur, H-Motor Steuerung, Stromversorgung, i2C Bus angeschlossen. Auf dem GLCD sind Messwerte zu sehen, mit der Tastertur lassen sich Variablen verändern. Der H-Motor (Epson Laser-unit) benötigt ein TTL Signal zum regulieren der Motorgeschwindigkeit. Das ATX-Netzteil dient als Stromversorgung für alle Komponenten außer dem Kontrollboard. Dieses wird durch die Standby-Stromquelle des Netzteils betrieben. Wird der Taster an der Front des Gehäuses betätigt, schaltet der Atmega das ATX-Netzteil ein( o. aus). Das ATX-Netzteil versorgt GLCD, Tastertur, Motor, ... mit Spannung.
Bauteile
1x Atmega32 ...

Schaltplan des Kontrollboards

SMD-Board des Kontrollboards


STATUS: gebaut, getestet, Neuentwurf notwendig, Atmega32 durch Atmega169 ersetzen
Horizontaler Motor/Spiegel
Aus einem Drucker der Marke "Epson" 24000 U/min mit 7 Seitenflächen. 400*7 = 2800 Ablenkungen pro Sekunde.
Stecker
Pin Funktion
1 +24V
2 GND
3 Eingang: 5V TTL 0Khz = 0 U/s, 1 Khz = 400U/s (nichtlineare Kennkurve)
4 Ausgang: 7*U/sek ??? sehr instabil, besser nicht nutzen!
5 ??

Laserunit eines Epsondruckers

STATUS: getestet
Laserstromversorgung
Diese Schaltung kann den Strom durch die Laserdiode bis zu einigen Mhz regulieren. 8 bit 5V/3.3V paralleler Bus + clock Leitung. Einstellbar sind Offset und Maximalstrom. Auflösung: 8 bit Schwingkreis zur Laserausrichtung, Gesamt-optische-leistung muss kleiner 0,005 W sein.
Bauteile
1x DAC908U-ND 1x OpAmp LMH6703 2x 4.3 OHM 1% 1x 68 ohm 1x 2KOHM 2x 33.2OHM 1x LM358DT - OP AMP 1x resistor array 2x ZDiode 6V ...
astabilder Multivibrator: P = 1 Watt Pges <= 0,005 Watt Frequenz f = 50 Hz Pulsweitenmodulation T = 1 / f = 1 / 50 = 20 * 10^-3 s T2 = T - T1 T1 <= 5 mWatt / (1000 mW * f) = 5mWs / 50000 mW = 1 / 10000 s = 0,1 ms T2 = 20ms - 0,1 ms = 19,9 ms
astabiler multivibrator T = ln(2) * R * C T2 = 19,9 ms T1 = 0,1 ms setze C = 100n = 1 * 10^-7 R2 = T2 / (ln(2) * C) = 19,9* 10^-3/ 10^-7 *ln(2) = 28,7 *10^4 = 287k R1 = T1 / (ln(2) * C) = 0,1 * 10^-3/ 10^-7 *ln(2) = 0,144 * 10^4 = 14,4k
STATUS: Entwurf angefertigt
Bildverarbeitung
STATUS: Cortex M3, bestellt
Anforderungen
Messung der Zeitspanne zwischen 2 Sync-pulsen
Mittelwert berechnung x (&Ausgabe)
Phasenschiebung p mit (p <= x)
Gammakorrektur g
bei 10Mpixel
STATUS:alternative erforderlich (Cortex-M3 ?)
Laserdiode
WARNUNG !
Dies ist ein Klasse 3 Laser ! Er verbrennt innerhalb von Sekunden Papier,Holz,Fleisch,... selbst in einigen Metern Entfernung !
Schutzbrille tragen
Nicht in den Strahl blicken !
Ich projektiere auf eine große Fläche > 1 qm, dadurch sind die Lichtpunkte an der Wand nicht so hell, dass man sich die Augen verbrennt !
Nie auf den Lichtpunkt blicken, wenn der Laser "steht". Verbrennungsgefahr !
Laserschutzbestimmungen einhalten !
1000mW (1W) Laserdiode 445nm Blau 5,6mm
TODO:
- Redoing the whole concept
- Design SMD boards
- Buy new motors, mirrors, laser,...
Links:
http://elm-chan.org/works/vlp/report_e.html
{kind=link}